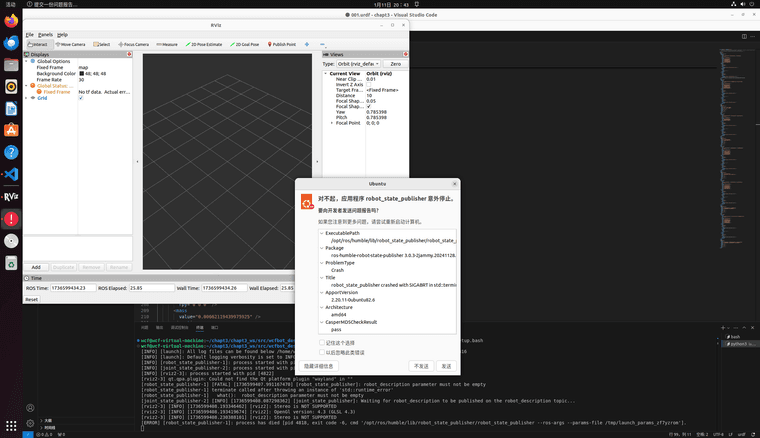
启动rviz显示robot_state_publisher意外停止
-
URDF文件时solidworks软件插件生成的,可以生成数学模型
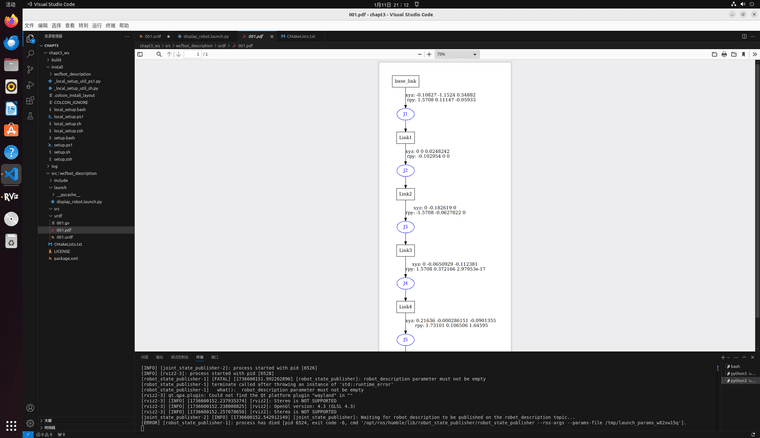
启动后有如下报错

-
要解决这个问题,我们首先需要确保你的URDF文件正确无误,并且与ROS(Robot Operating System)兼容。以下是一些可能的解决步骤和检查点:
-
检查URDF文件:
- 确保URDF文件没有语法错误。你可以使用
xmllint工具来检查URDF文件的XML格式是否正确:
替换xmllint --noout --schema /opt/ros/noetic/share/urdfdom/xmlschema/urdf.xsd your_robot.urdf.xmlyour_robot.urdf.xml为你的URDF文件路径。 - 确保所有链接(links)、关节(joints)和惯性(inertia)参数都正确无误。
- 确保URDF文件没有语法错误。你可以使用
-
验证URDF模型:
- 使用
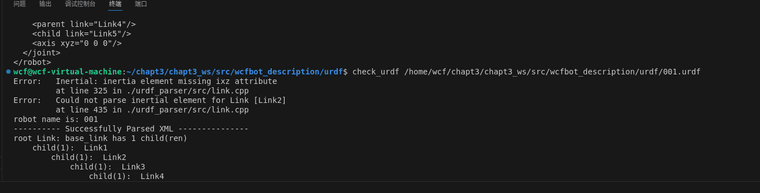
check_urdf工具来验证URDF文件:check_urdf your_robot.urdf.xml - 这将显示任何潜在的错误或警告,例如缺少的惯性参数、不正确的关节类型等。
- 使用
-
检查机器人状态发布者(robot_state_publisher)的启动:
- 确保你正确启动了
robot_state_publisher节点。通常,你可以使用如下命令启动:rosrun robot_state_publisher robot_state_publisher your_robot.urdf.xml - 确保URDF文件的路径正确。
- 确保你正确启动了
-
查看ROS日志:
- 使用
rqt_console或rostopic echo /rosout来查看ROS的日志输出,这可能会提供更多关于为什么robot_state_publisher停止的信息。 - 查找任何与URDF相关的错误消息。
- 使用
-
依赖性和环境问题:
- 确保你安装了所有必要的ROS包和依赖项。
- 如果你使用的是特定的ROS版本(如Noetic),确保所有包都与此版本兼容。
-
SolidWorks插件生成的URDF:
- 虽然SolidWorks插件可以生成URDF文件,但生成的URDF可能需要手动调整以符合ROS的要求。
- 检查插件生成的URDF文件是否包含ROS不支持的特性或格式。
-
物理模拟和惯性参数:
- 确保所有链接都定义了质量和惯性参数。在物理模拟中,这些参数是必需的。
-
重新生成和测试:
- 如果可能,尝试手动编辑URDF文件,或使用其他工具(如Blender的ROS插件)重新生成URDF。
如果以上步骤都不能解决问题,你可能需要更详细地检查URDF文件的内容,或考虑在ROS社区或相关论坛中寻求帮助。在寻求帮助时,提供完整的错误信息和URDF文件的相关部分将有助于他人更快地诊断问题。
以上为生成回答,仅供参考~
-
-
@小伊
URDF文件的文件和模型都正确 -
如果URDF文件的文件和模型都被确认是正确的,那么通常意味着该文件遵循了URDF(统一机器人描述格式)的规范,并且所描述的机器人模型在结构上是合理且完整的。以下是对URDF文件和模型正确性的一些进一步解释和验证步骤:
URDF文件正确性
-
语法正确性:
- URDF文件是一个XML文件,因此它必须遵循XML的语法规则,如正确的标签闭合、属性定义等。
- 可以使用
check_urdf命令来检查URDF文件的语法是否正确。这个命令会解析URDF文件,并显示解析过程中发现的问题。
-
结构完整性:
- URDF文件必须包含
<robot>标签,该标签内应包含描述机器人各个部分(link)和连接(joint)的<link>和<joint>标签。 - 每个
<link>标签应描述机器人的一个刚体部分,包括其外观(如尺寸、颜色、形状)、物理属性(如惯性矩阵)和碰撞参数等。 - 每个
<joint>标签应描述机器人关节的运动学和动力学属性,包括关节的类型(如旋转关节、滑动关节等)、连接的两个刚体(父级和子级)、关节的运动限制(如上下限位置、速度限制等)。
- URDF文件必须包含
模型正确性
-
物理属性合理性:
- 检查URDF文件中定义的机器人各个部分的物理属性是否合理,如重量、惯性矩阵等。
- 确保这些属性与机器人的实际物理特性相符。
-
运动学关系正确性:
- 检查URDF文件中定义的关节连接关系是否正确,即父级和子级刚体的连接是否正确。
- 确保关节的类型和运动限制与机器人的实际运动特性相符。
-
可视化验证:
- 可以使用RViz等可视化工具来加载和显示URDF模型。
- 通过RViz,可以直观地看到机器人的结构、各个部分之间的连接关系以及关节的运动情况。
- 如果模型在RViz中显示正确且运动正常,那么可以认为URDF文件和模型在结构上是正确的。
-
仿真验证:
- 可以将URDF模型导入到Gazebo等仿真环境中进行仿真验证。
- 通过仿真,可以进一步验证机器人的运动学、动力学以及传感器等方面的性能。
- 如果仿真结果符合预期,那么可以认为URDF文件和模型在功能上是正确的。
其他注意事项
- 文件路径:确保URDF文件中引用的模型渲染文件(如STL文件)的路径是正确的。如果路径错误或文件缺失,可能会导致模型无法正确加载或显示。
- 依赖项:确保已安装所有必要的依赖项和工具,如ROS、RViz、Gazebo等。这些工具是验证URDF文件和模型正确性的重要手段。
综上所述,如果URDF文件的文件和模型都被确认是正确的,那么可以通过上述步骤进一步验证其正确性和完整性。在验证过程中,如果发现任何问题或异常,应及时进行修正和调整。
以上为生成回答,仅供参考~
-
-
@小伊

rosbash软件包无法被安装 -
如果在安装rosbash软件包时遇到问题,可以尝试以下步骤来解决:
一、更新软件包列表
在安装新的软件包之前,建议先更新软件包列表。这可以确保安装的是最新版本的软件包。在终端中输入以下命令并回车:
sudo apt update二、安装rosbash软件包
更新软件包列表后,可以尝试安装rosbash软件包。在终端中输入以下命令并回车:
sudo apt install rosbash这条命令会搜索rosbash软件包,并尝试安装它及其依赖项。安装过程中,系统会提示输入管理员(root)密码,以确保只有授权用户才能执行需要更高权限的命令。在提示符下输入密码,然后按回车确认。注意,出于安全考虑,密码在输入时不会显示在屏幕上。
三、检查安装是否成功
安装完成后,可以通过运行以下命令来确认rosbash是否已成功安装:
rosbash --version如果rosbash已正确安装,这个命令将显示rosbash的版本信息。
四、解决安装过程中的常见问题
-
软件包无法定位:
- 如果在安装过程中遇到“无法定位软件包”的错误,可能是因为软件源中没有包含rosbash软件包。可以尝试更换软件源,例如使用国内的镜像源,然后再次更新软件包列表并尝试安装。
-
依赖问题:
- 如果在安装过程中遇到依赖问题,可以尝试使用
apt的-f选项来修复依赖关系:
sudo apt -f install然后再次尝试安装rosbash。
- 如果在安装过程中遇到依赖问题,可以尝试使用
-
权限问题:
- 如果在安装过程中遇到权限问题,确保以管理员身份运行安装命令,并检查是否有足够的权限来写入安装目录。
通过以上步骤,应该能够解决大部分在安装rosbash软件包时遇到的问题。如果问题仍然存在,可能需要检查系统的具体配置或寻求更专业的帮助。
以上为生成回答,仅供参考~
-
-
安装rosbash时与python3-catkin-pkg冲突