导航全部和局部地图不符
-
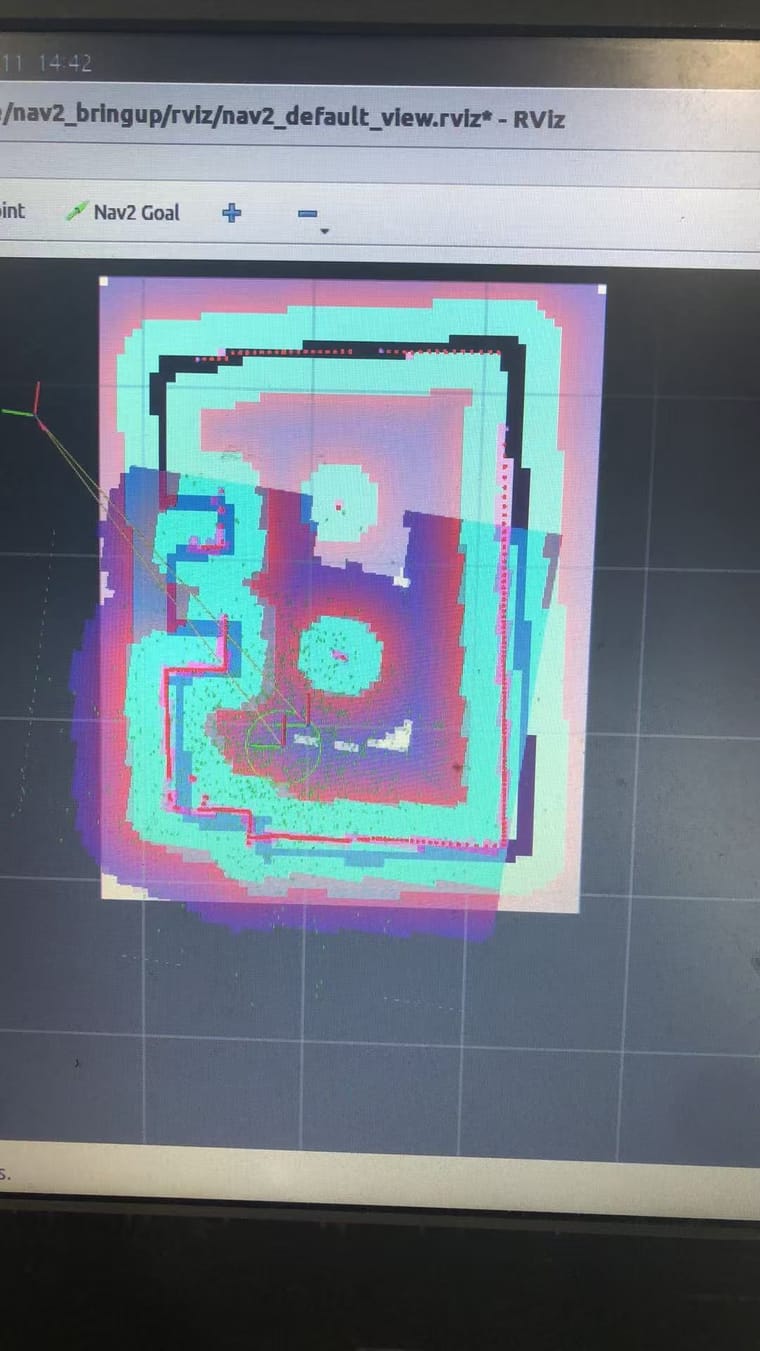 ,这是刚开始的导航地图
,这是刚开始的导航地图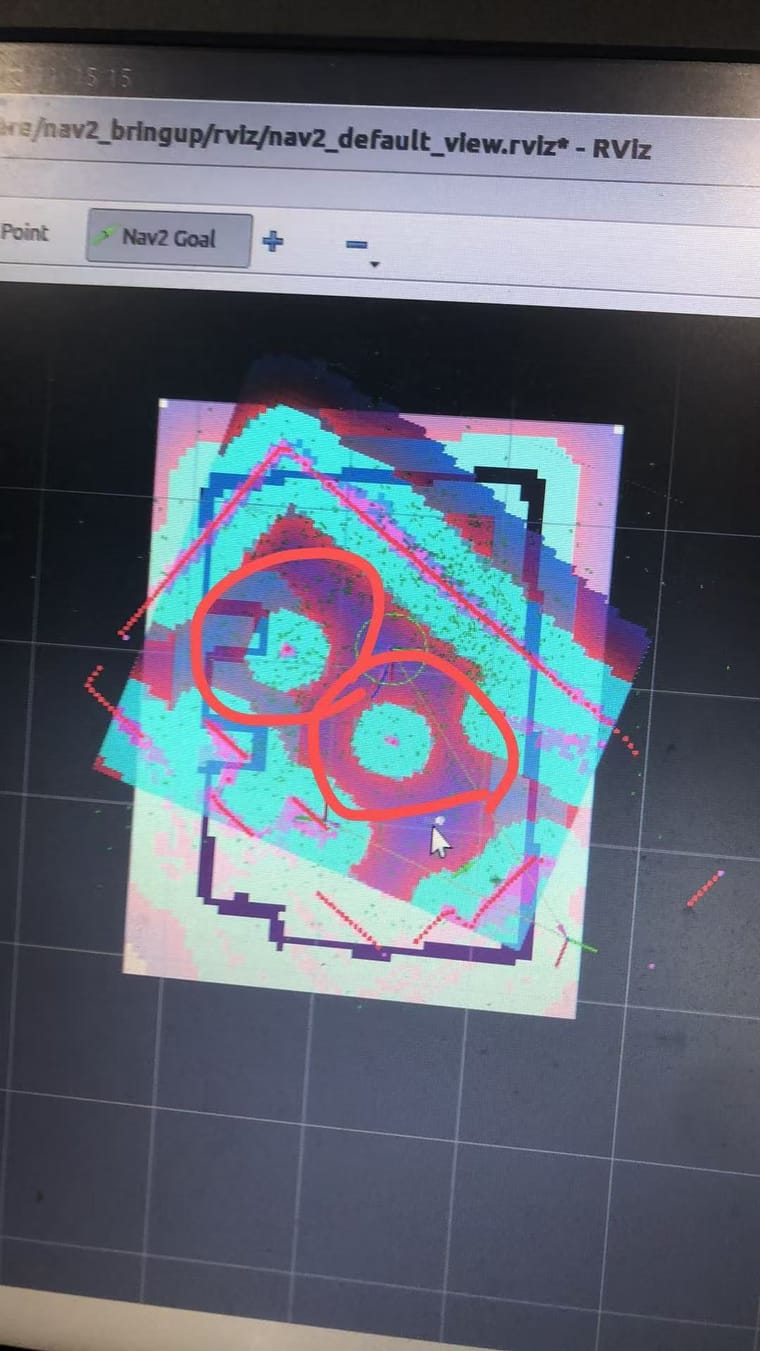 ,这是导航后的地图。
,这是导航后的地图。图片中两个圆形的是桌子的脚。
问题:为什么桌子的脚的地图会在全局地图中旋转
-
这是一道关于导航地图中物体位置变化的问题。我们需要分析导航过程中全局地图与局部地图的差异,以及为何特定物体(如桌子的脚)在全局地图中的位置会发生变化,特别是旋转现象。
-
问题理解:
- 导航开始时和结束后的地图存在差异。
- 注意到桌子的脚在两个地图中的位置有所不同,特别是在全局地图中出现了旋转。
-
地图差异分析:
- 全局地图通常用于展示整个环境的布局,而局部地图可能更侧重于当前导航区域或设备的即时周围环境。
- 导航过程中,设备的位置和朝向可能会发生变化,这会影响局部地图相对于全局地图的显示。
-
桌子脚旋转的可能原因:
- 导航设备的朝向变化:如果导航设备(如机器人或手机)在导航过程中改变了朝向,那么局部地图中物体的位置(相对于设备)也会相应变化。当这种局部变化映射到全局地图时,就可能出现物体(如桌子的脚)看似旋转的现象。
- 地图配准问题:如果全局地图和局部地图在配准(即对齐)时存在误差,也可能导致物体在全局地图中的位置显示不准确,包括旋转。
- 传感器误差:导航设备使用的传感器(如陀螺仪、加速度计等)可能存在误差,这些误差在长时间导航过程中会累积,导致设备对自身位置和朝向的判断不准确,进而影响地图显示。
-
结论:
- 桌子脚在全局地图中旋转的现象很可能是由于导航设备在导航过程中朝向的变化、地图配准问题或传感器误差所导致的。这些因素共同作用,使得局部地图中的物体位置在映射到全局地图时发生了旋转。
综上所述,要解决这一问题,可能需要检查导航设备的朝向跟踪准确性、全局和局部地图的配准精度以及传感器的校准状态。
以上为生成回答,仅供参考~
-
-
@sam-zzy 你这个图太小了,机器人无路可走