里程计问题
-
麦克纳姆轮驱动的小车在导航时,怎么配置或校准里程计。
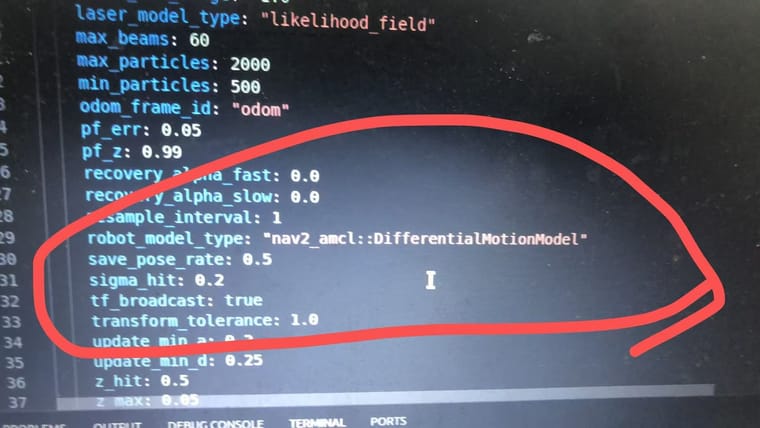
图示中的 robot_model_type该怎么配置,还是说不用改动。 -
针对麦克纳姆轮驱动的小车在导航时的里程计配置或校准问题,以下是一些具体的步骤和建议:
一、里程计配置
-
确定机器人运动学模型:
- 确保已经为麦克纳姆轮驱动的小车输入了正确的运动学模型。这是里程计配置的基础,因为里程计的计算依赖于机器人的运动学特性。
-
配置
robot_model_type:- 在ROS(Robot Operating System)中,
robot_model_type通常用于指定机器人的类型或模型。对于麦克纳姆轮驱动的小车,如果使用的导航栈或里程计包已经支持这种类型的机器人,则可能不需要改动robot_model_type。 - 然而,如果导航栈或里程计包不支持麦克纳姆轮驱动的小车,或者需要特定的配置才能正确工作,那么可能需要根据文档或源代码的要求来设置
robot_model_type。这通常涉及到修改配置文件或参数服务器中的设置。
- 在ROS(Robot Operating System)中,
-
检查并配置相关参数:
- 根据麦克纳姆轮的特性,可能需要配置一些与轮子尺寸、轮距等相关的参数。这些参数将影响里程计的计算精度。
- 确保这些参数已经根据小车的实际尺寸进行了正确配置。
二、里程计校准
-
启动初始化节点和控制节点:
- 首先,启动小车的初始化节点和控制节点。这通常涉及到运行特定的ROS启动文件来加载必要的节点和参数。
-
查看里程计信息:
- 使用
rostopic echo /odom命令来查看里程计发布的信息。这将帮助你了解当前里程计的状态和输出。
- 使用
-
进行标定:
- 直线标定:控制小车沿直线移动一定距离(例如1米),并观察里程计输出的x值变化是否与预期相符。如果不符,可能需要调整车轮大小等参数。
- 横向标定:控制小车进行横向移动,并观察y值变化是否与预期相符。同样,如果不符,也需要进行相应的调整。
- 角度标定:使小车旋转一周,并观察里程计输出的角度变化(通常是z值)是否与预期(例如6.28弧度或360度)相符。如果不符,可能需要调整小车车身尺寸和轮距等参数。
-
重复标定和调整:
- 根据标定结果,可能需要多次调整参数并重新进行标定,直到里程计的精度满足要求。
三、注意事项
- 在进行里程计配置和校准之前,请确保已经仔细阅读了相关文档和源代码,以了解所需的具体步骤和参数设置。
- 麦克纳姆轮驱动的小车具有独特的运动学特性,因此在配置和校准里程计时需要特别注意这些特性对里程计计算的影响。
- 如果使用的是第三方导航栈或里程计包,请确保它们支持麦克纳姆轮驱动的小车,并按照相应的文档进行配置和校准。
综上所述,针对麦克纳姆轮驱动的小车在导航时的里程计配置或校准问题,需要根据实际情况进行具体的参数设置和标定工作。通过正确的配置和校准,可以提高里程计的精度和可靠性,从而改善小车的导航性能。
以上为生成回答,仅供参考~
-
-
@sam-zzy 不用改,就是按照差速使用的