rosdepc安装初始化问题
-
 /home/duan/Pictures/截图/截图 2025-02-17 23-07-11.png
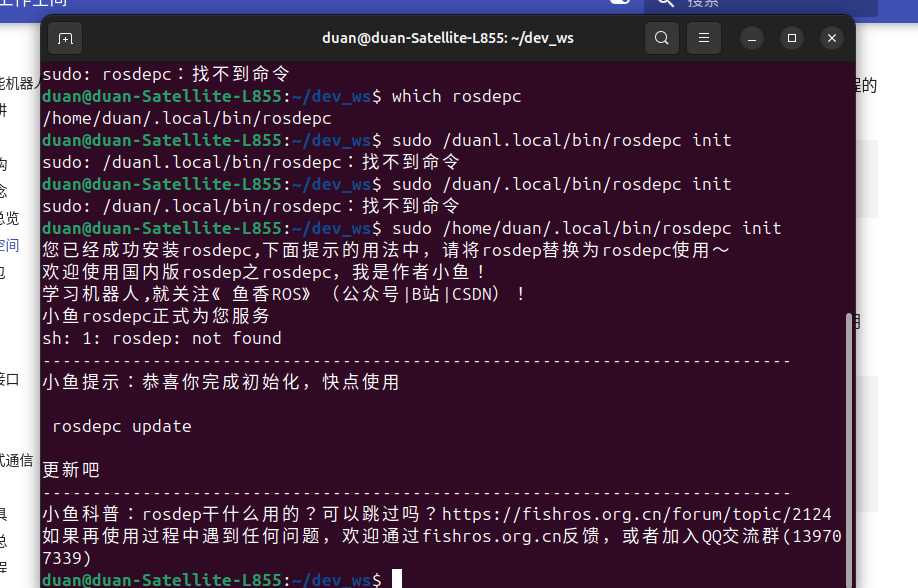
/home/duan/Pictures/截图/截图 2025-02-17 23-07-11.png执行初始化命令一直提示 rosdep:not found,烦请指教啊。
-
当你在尝试使用
rosdep命令时遇到 “rosdep: command not found” 的错误,这通常意味着rosdep工具没有被正确安装在你的系统中。rosdep是 ROS (Robot Operating System) 的一个工具,用于安装系统依赖项。以下是解决这个问题的步骤:-
确认 ROS 是否已安装:
首先,确保你已经正确安装了 ROS。可以通过在终端运行roscore命令来检查 ROS 是否安装成功。如果roscore能够启动(尽管它可能会因为缺少其他组件而报错),那么 ROS 基础环境至少是安装了的。 -
安装 rosdep:
如果 ROS 已安装但rosdep未安装,你可以通过以下命令安装它(假设你使用的是 Ubuntu 系统):sudo apt update sudo apt install python3-rosdep注意:根据你的 ROS 版本和 Ubuntu 版本,可能需要安装的是
python-rosdep而不是python3-rosdep。例如,在 ROS Kinetic(适用于 Ubuntu 16.04)上,你应该安装python-rosdep。 -
初始化 rosdep:
安装完rosdep后,你需要初始化它。这通常涉及到设置一些源和更新依赖信息。运行以下命令:sudo rosdep init rosdep updatesudo rosdep init命令会在你的 home 目录下的.ros文件夹中创建一个rosdep目录,并下载一些必要的配置文件。rosdep update命令会更新这些依赖信息。 -
检查环境变量:
确保你的 shell 环境变量已经正确设置以包含 ROS 的环境。这通常是通过在你的~/.bashrc或~/.zshrc文件中添加以下行来实现的(取决于你使用的是 bash 还是 zsh):source /opt/ros/<distro>/setup.bash将
<distro>替换为你安装的 ROS 发行版,如melodic、noetic等。修改后,运行source ~/.bashrc或重新打开终端以使更改生效。 -
重新尝试你的命令:
现在,你应该能够运行rosdep命令而不会遇到 “command not found” 错误。
如果在执行上述步骤后仍然遇到问题,请检查是否有任何错误消息,并根据错误消息进一步调试。此外,确保你的用户具有执行这些命令的权限。
以上为生成回答,仅供参考~
-