里程计标定
-
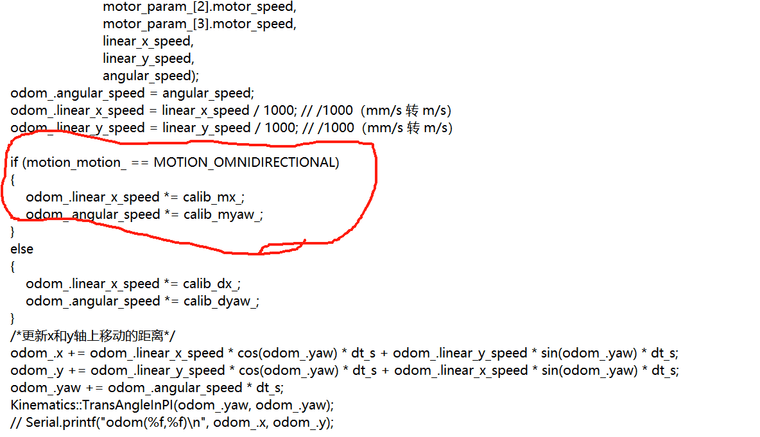
为什么这里只对x方向速度做修正,不对y方向速度做修正。 -
在里程计标定的过程中,针对x方向速度进行修正而不直接对y方向速度进行修正的原因,可能涉及多个方面,这主要取决于具体的应用场景、系统模型以及标定方法。以下是对此问题的详细分析:
一、应用场景与模型考虑
-
车辆或机器人运动特性:
- 在许多车辆或移动机器人的应用场景中,它们往往沿着特定的路径或方向运动,例如自动驾驶车辆在道路上行驶,其主要运动方向是前进(即x方向)。
- y方向(横向)的运动相对较少,或者对整体运动的影响较小。
-
里程计测量原理:
- 里程计通常通过测量车轮的旋转来推算车辆或机器人的移动距离和方向。
- 在直线运动中,x方向的速度测量相对准确;而在y方向(即横向)上,由于车轮的旋转主要产生前进方向的位移,横向位移的测量可能不够准确或稳定。
二、标定方法与误差分析
-
标定目标:
- 里程计标定的主要目标是提高里程计测量的准确性,特别是在车辆或机器人主要运动方向上(如x方向)。
- 对于y方向速度,由于其在实际运动中的影响较小或测量不准确,因此在标定过程中可能不是主要关注点。
-
误差来源与修正:
- 里程计的误差可能来源于多个方面,如车轮尺寸不准确、路面不平整导致的打滑、编码器精度问题等。
- 在标定过程中,通常会对这些误差来源进行分析和修正,以提高x方向速度的测量准确性。
- 对于y方向速度,由于其测量不准确或影响较小,可能不需要或无法进行类似的修正。
三、特殊情况与考虑
-
特殊应用场景:
- 在某些特殊应用场景中,如全方位移动机器人或需要进行复杂轨迹跟踪的车辆,y方向速度的测量和修正可能变得重要。
- 在这种情况下,可能需要采用更复杂的标定方法和模型来同时修正x方向和y方向的速度测量误差。
-
系统模型与算法优化:
- 随着系统模型和算法的不断优化,未来可能会发展出能够同时准确测量和修正x方向和y方向速度误差的里程计标定方法。
综上所述,在里程计标定过程中只对x方向速度做修正而不直接对y方向速度做修正的原因可能涉及应用场景、系统模型以及标定方法等多个方面。在实际应用中,应根据具体需求和场景选择合适的标定方法和模型来提高里程计的测量准确性。
以上为生成回答,仅供参考~
-
-
@sam-zzy 因为导航过程中,麦轮按照差速轮子处理的,y方向线速度一直是0的,不需要修正