ros2的map发布
-
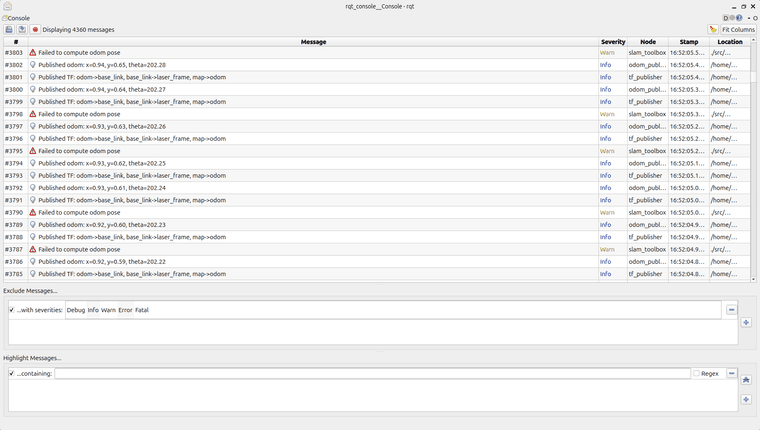 求大佬帮我看看,/tf发布了三个变换,/odom也正常发布了,/scan不知道什么原因没有在这里显示出来,但是使用echo可以打印发布的内容,内容频率什么的已经问过gpt了,tf树也可视化过了,都没什么问题。但是就/odom没法接收,一直报错。有试过将odom设置成base_frame,没报错了,但是/map不发布。求解
求大佬帮我看看,/tf发布了三个变换,/odom也正常发布了,/scan不知道什么原因没有在这里显示出来,但是使用echo可以打印发布的内容,内容频率什么的已经问过gpt了,tf树也可视化过了,都没什么问题。但是就/odom没法接收,一直报错。有试过将odom设置成base_frame,没报错了,但是/map不发布。求解
-
在ROS 2中处理SLAM(Simultaneous Localization and Mapping)和TF(Transform)树时,确保各个坐标系(frames)之间的变换正确发布和接收是非常重要的。从你描述的情况来看,
/tf发布了三个变换,/odom也正常发布,但/scan虽然在echo时可以打印内容,却没有在TF树中显示,同时/odom无法被接收(即使尝试设置为base_frame),最后/map无法发布。这里有一些可能的解决步骤和检查点:-
确认TF关系:
- 使用
ros2 run tf2_tools view_frames来生成并查看TF树的可视化文件(通常是一个PDF)。确保/map,/odom, 和base_link(或你的机器人基础坐标系)之间的关系是正确的。/scan应该连接到base_link或类似的传感器坐标系。
- 使用
-
检查节点日志:
- 使用
ros2 node list查看所有正在运行的节点。 - 使用
ros2 node info <node_name>查看特定节点的详细信息,包括它发布的和订阅的话题。 - 使用
ros2 topic echo /tf_static std_msgs/msg/TransformStamped或ros2 topic echo /tf std_msgs/msg/TransformStamped(取决于你使用的是静态还是动态TF)来实时查看TF消息。 - 检查是否有任何错误或警告消息在节点日志中,这可以通过
ros2 node log <node_name>来查看。
- 使用
-
检查频率和延迟:
- 即使
echo能够打印/scan的内容,也要检查它的发布频率和是否有任何延迟。使用ros2 topic hz /scan来检查频率。 - 检查
/odom到/map的变换是否有足够的频率和准确性。
- 即使
-
确认静态和动态TF:
- 确保你没有混淆静态TF(通常用于固定不变的转换,如机器人结构)和动态TF(用于随时间变化的转换,如定位和导航)。
-
检查代码和配置:
- 如果你有访问到相关的代码(如SLAM节点的代码),检查是否有任何逻辑错误或配置错误,特别是关于TF发布的部分。
- 确认是否所有需要的参数都被正确设置,如
robot_localization节点可能需要配置正确的参数来接收和处理/odom和/scan。
-
重启和清理:
- 有时候,简单地重启ROS 2节点或整个系统可以解决一些难以追踪的问题。
- 使用
ros2 service call /node_name/reset std_srvs/srv/Trigger(如果节点提供了该服务)来重置节点状态。
-
使用调试工具:
- 如果问题依旧存在,考虑使用
gdb或其他调试工具来跟踪问题发生的具体位置。
- 如果问题依旧存在,考虑使用
如果以上步骤都无法解决问题,可能需要更详细地检查你的SLAM算法和TF发布的实现。在ROS社区论坛或相关GitHub仓库中寻求帮助也是一个不错的选择。
以上为生成回答,仅供参考~
-