9.0.6建图测试中车不懂,雷达坐标到处飞
-
鱼哥,建图不成功,车不动,雷达到处飞。是什么原因雷达的坐标到处飞?
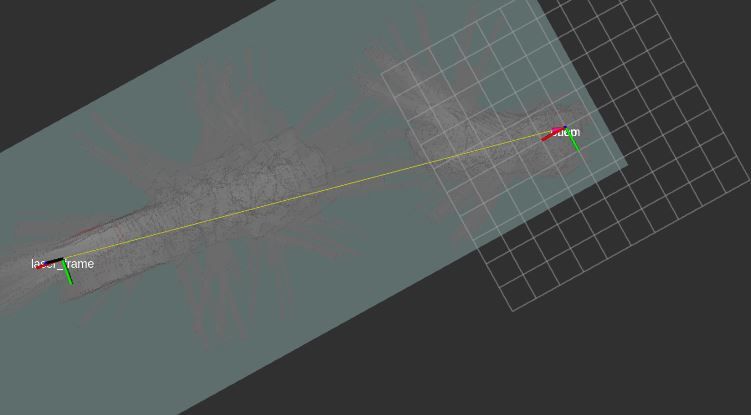
【rviz2-5】 【ERROR】 【1740654185.856528800】 【rviz2】: Lookup would require extrapolation into the future. Requested time 1740654185.857362 but the latest data is at time 1740654185.857362, when looking up transform from frame 【laser_frame】 to frame 【map】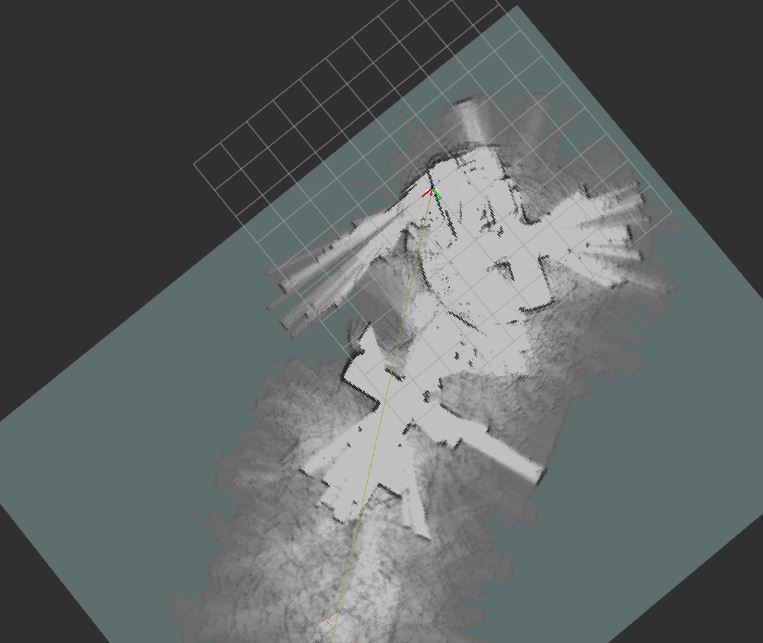
-
在解决建图测试中车辆不动且雷达坐标到处飞的问题时,我们可以从以下几个方面进行分析和排查:
-
雷达数据异常(坐标到处飞):
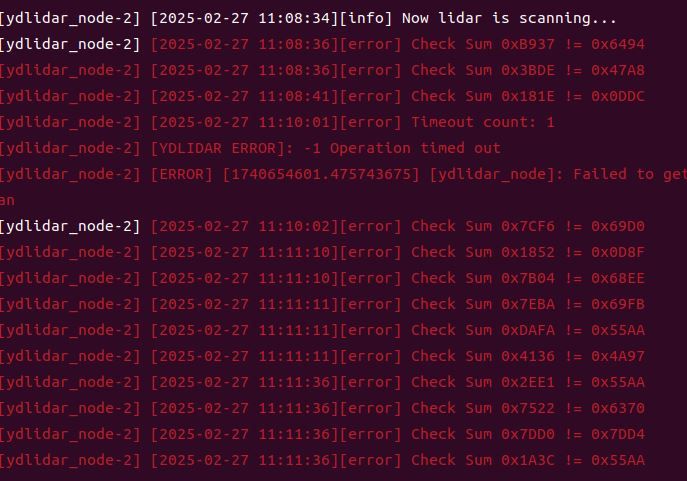
- 雷达故障:首先检查雷达硬件是否工作正常,包括连接、供电、传感器本身的健康状况等。可以通过查看雷达的原始数据(如通过ROS话题订阅雷达数据)来判断数据是否有异常跳动或不连续。
- 标定问题:雷达与车辆的相对位置关系是否准确标定。如果雷达的内外参标定不准确,会导致雷达数据在转换到车辆坐标系时出现较大偏差。
- 环境干扰:雷达工作环境是否存在大量干扰,如强反射面、快速移动物体等,这些都可能导致雷达数据异常。
-
建图不成功,车辆不动:
- 定位失败:如果车辆在建图过程中未能成功定位,可能是因为初始位置不准确,或者环境中没有足够的特征点供算法识别。检查初始位姿估计是否准确,以及环境中是否有足够的特征(如角点、边缘等)供SLAM算法使用。
- 控制指令未发送:确认车辆的控制系统是否接收到建图算法的移动指令。可以通过查看控制相关的话题(如
/cmd_vel)来确认是否有指令发出,以及指令是否合理。 - 软件配置问题:检查ROS节点和话题的配置是否正确,确保所有必要的节点都在运行,且话题之间的连接是正确的。
-
时间戳问题(rviz2错误):
- 时间同步:错误信息显示请求的时间戳与最新数据的时间戳相同,但提示需要外推。这通常意味着时间同步存在问题。确保所有传感器和计算节点的时间都已同步。在ROS系统中,可以使用
ntp或chrony等工具来同步系统时间。 - 坐标变换延迟:如果
/tf(坐标变换)系统延迟较大,也可能导致此类错误。检查/tf树的结构和发布频率,确保所有必要的变换都是实时且准确的。
- 时间同步:错误信息显示请求的时间戳与最新数据的时间戳相同,但提示需要外推。这通常意味着时间同步存在问题。确保所有传感器和计算节点的时间都已同步。在ROS系统中,可以使用
-
综合排查:
- 日志分析:仔细查看ROS的日志输出,特别是与雷达、定位、控制和时间同步相关的部分,可能会有更具体的错误信息。
- 简化测试:尝试在一个相对简单、无干扰的环境中进行测试,逐步增加复杂度,以确定问题的具体来源。
通过上述步骤,可以系统地排查和解决建图测试中遇到的问题。如果问题依旧存在,可能需要更深入地分析具体的算法实现或寻求专业帮助。
以上为生成回答,仅供参考~
-
-
@希望再小也要挣扎 考虑网络质量问题,先检查雷达数据