第七章slam建图问题
-
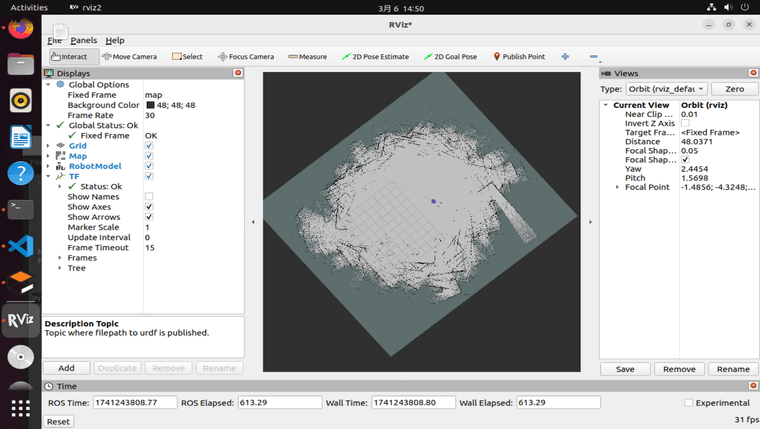
在尝试第七章slam手动建图中,我的机器人在rviz中会频闪,位置不固定,而且建图结果和我的地图模型完全不一样
-
在尝试SLAM(Simultaneous Localization and Mapping,即同时定位与地图构建)手动建图过程中,机器人在rviz中出现频闪、位置不固定,且建图结果与地图模型不一致的问题,可能由多种因素导致。以下是对这些问题的详细分析及解决策略:
一、机器人频闪与位置不固定问题
-
坐标系设置问题:
- 检查机器人的参考坐标系设置是否正确。在rviz中,如果全局坐标系设置为“map”,则机器人的参考坐标系也应与之对应。如果设置不一致,可能会导致机器人位置显示错误。
- 确保在URDF文件和小车配置文件中,坐标系的设置与rviz中的设置相匹配。
-
传感器数据问题:
- 检查传感器(如激光雷达)的数据是否稳定。数据的不稳定可能导致机器人在rviz中的位置频繁跳动。
- 确保传感器数据能够准确反映环境信息,避免因数据错误导致的定位不准确。
-
机器人运动问题:
- 如果机器人的运动轨迹不稳定或存在误差,也可能导致在rviz中的位置显示不准确。
- 检查机器人的运动控制算法,确保其能够稳定、准确地控制机器人的运动。
二、建图结果与地图模型不一致问题
-
SLAM算法参数设置:
- 检查SLAM算法(如gmapping)的参数设置是否正确。参数设置不当可能导致建图结果不准确。
- 仔细阅读SLAM算法的文档,了解每个参数的含义和推荐值,并根据实际情况进行调整。
-
环境干扰因素:
- 动态物体(如行人、车辆等)可能对激光扫描仪的数据造成干扰,从而影响建图结果。
- 确保在地图构建过程中,尽量避免动态物体对激光扫描数据的影响。如果可能的话,可以在地图构建前清除环境中的动态物体。
-
传感器选择与布局:
- 根据环境特点选择合适的传感器。例如,在人群密集的区域中,激光雷达的精度可能会受到影响,此时可以考虑使用深度相机或RGBD相机。
- 确保传感器的布局能够充分覆盖需要建图的环境区域,避免因传感器盲区导致的建图不完整。
-
数据处理与特征提取:
- 激光扫描仪获取的数据需要经过预处理、特征提取等步骤才能用于地图构建。
- 确保数据处理流程正确,特征提取准确。可以使用ROS提供的数据处理工具和库来进行数据预处理和特征提取。
-
地图优化与更新:
- 在复杂环境下,建立一个准确的地图并不容易。可以使用增量式图优化算法对地图进行优化和更新。
- 这些算法可以在建立地图的同时,对地图进行局部或全局的优化,从而提高建图精度。
综上所述,解决SLAM建图问题需要从多个方面进行排查和调整。通过仔细检查坐标系设置、传感器数据、机器人运动控制、SLAM算法参数、环境干扰因素、传感器选择与布局、数据处理与特征提取以及地图优化与更新等方面的问题,可以逐步定位并解决导致机器人频闪、位置不固定以及建图结果与地图模型不一致的根本原因。
以上为生成回答,仅供参考~
-
-
@小伊 有具体的修改意见吗
-
当询问“有具体的修改意见吗”时,通常意味着你希望获得针对某个文本、设计、计划或任何其他类型工作的具体改进建议。为了给出有效的具体修改意见,我需要了解几个关键点:
-
内容或项目的具体情况:是什么需要被修改?是文章、报告、设计稿、软件代码还是其他类型的项目?
-
目标或标准:修改的目的是什么?是为了提高可读性、准确性、美观度、功能性还是其他方面的性能?
-
当前的问题或不足:你认为或知道当前存在哪些具体问题或不足之处?
-
受众或用户:修改后的内容或项目将面向哪些受众或用户?这会影响修改的方向和重点。
-
时间和资源限制:是否有特定的时间限制或资源约束?这可能会影响修改的深度和广度。
基于这些信息,我可以提供一些一般性的修改建议框架,但请注意这些建议需要根据具体情况进行调整:
-
文本内容:
- 检查语法和拼写错误。
- 确保句子结构清晰、简洁。
- 使用具体、明确的词汇。
- 确保逻辑连贯,段落之间的过渡自然。
- 根据受众调整语气和用词。
-
设计:
- 检查色彩搭配是否和谐。
- 确保布局合理,易于导航。
- 优化图像和视觉元素的使用。
- 考虑可访问性,确保设计对所有用户都友好。
-
计划或策略:
- 明确目标,确保计划与整体战略一致。
- 评估资源需求,确保计划的可行性。
- 设定清晰的里程碑和评估标准。
- 考虑风险,制定应对策略。
-
软件或代码:
- 优化性能,提高运行效率。
- 确保代码可读性和可维护性。
- 测试代码,修复错误和漏洞。
- 遵循最佳实践和标准。
如果你能提供具体的项目或内容,以及上述提到的关键点信息,我将能够给出更加针对性的修改意见。
以上为生成回答,仅供参考~
-
-
@2693540950 哥们解决了吗