rviz中没有机器人模型
-
标题:rviz中没有显示机器人模型
问题描述:
已经下载编译好后,运行测试

运行结果如下:
ros2 launch fishbot_description display_rviz2.launch.py
[INFO] [launch]: All log files can be found below /home/lwq/.ros/log/2025-03-19-18-56-30-867405-DESKTOP-JVIV4UF-39721
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [robot_state_publisher-1]: process started with pid [39722]
[INFO] [rviz2-2]: process started with pid [39724]
[robot_state_publisher-1] [WARN] [1742381791.004789716] [robot_state_publisher]: No robot_description parameter, but command-line argument available. Assuming argument is name of URDF file. This backwards compatibility fallback will be removed in the future.
[robot_state_publisher-1] [INFO] [1742381791.027842824] [robot_state_publisher]: got segment base_link
[robot_state_publisher-1] [INFO] [1742381791.027912524] [robot_state_publisher]: got segment caster_link
[robot_state_publisher-1] [INFO] [1742381791.027919324] [robot_state_publisher]: got segment imu_link
[robot_state_publisher-1] [INFO] [1742381791.027923724] [robot_state_publisher]: got segment laser_link
[robot_state_publisher-1] [INFO] [1742381791.027928424] [robot_state_publisher]: got segment left_wheel_link
[robot_state_publisher-1] [INFO] [1742381791.027932724] [robot_state_publisher]: got segment right_wheel_link
[rviz2-2] QStandardPaths: wrong permissions on runtime directory /run/user/1000/, 0755 instead of 0700
[rviz2-2] [INFO] [1742381793.863918292] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-2] [INFO] [1742381793.864182292] [rviz2]: OpenGl version: 4.1 (GLSL 4.1)
[rviz2-2] [INFO] [1742381793.914118369] [rviz2]: Stereo is NOT SUPPORTED结果如下:

修改map为base_link也是不行

运行gazebo命令可以显示:

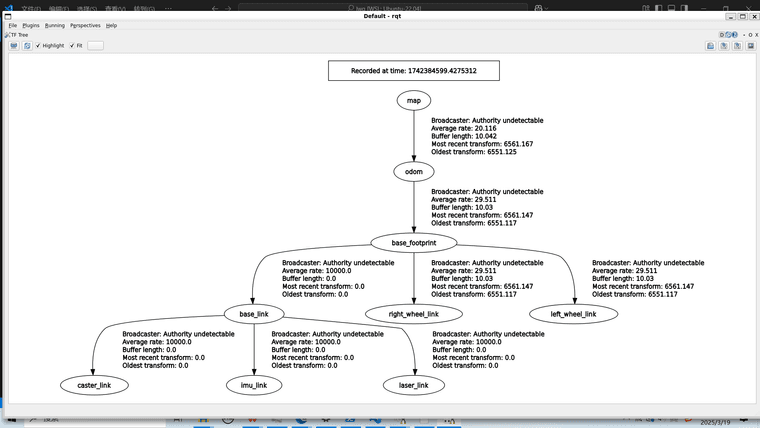
运行建图命令ros2 launch fishbot_cartographer cartographer.launch.py 效果如下:都是没有机器人模型

具体细节和上下文:
尝试过的解决方法:
urdf和launch文件都没有问题
已经添加RobotModel 显示类型
已经ai过,和翻过论坛还是没解决
请帮忙看看谢谢大佬 -
-
@2513522440 看最新的教程,这个已经不维护了,大概率是版本不兼容之类导致的
-
@小鱼 哦哦谢谢大佬,我用的是wsl2下的ros2humble
就是根据这一个教程是吗

我还想问问用wsl的话后续跟小车通讯会有困难吗,因为我在linux里一直连不了网 -
@2513522440 wsl 下有困难哦,网络穿透和 硬件穿透都不好 搞