学习到第六章,把gazebo的两轮差速插件换成ros2_control的控制插件后,gazebo一启动就崩溃
-
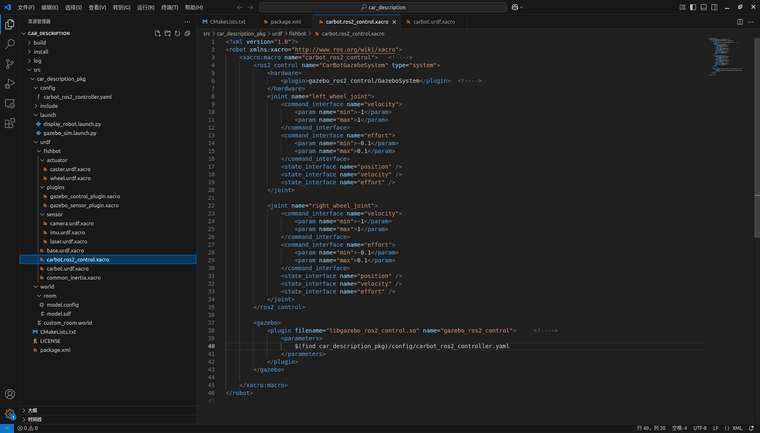
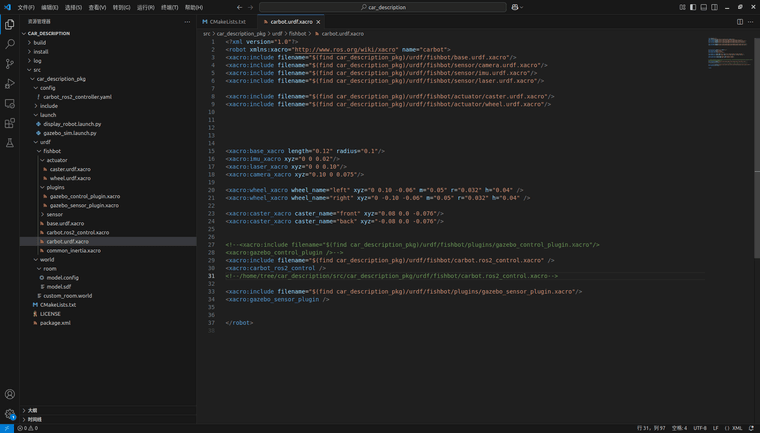
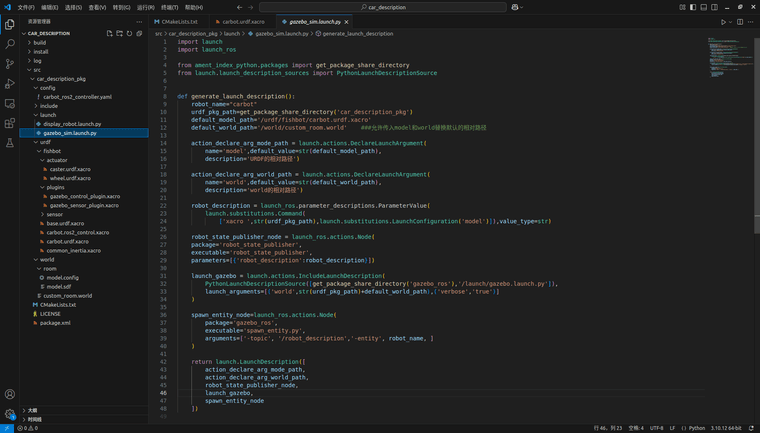
代码从上到下分别对应小鱼的
fishbot.ros2_control.xacro
fishbot.urdf.xacro ,
gazebo_sim.launch.py
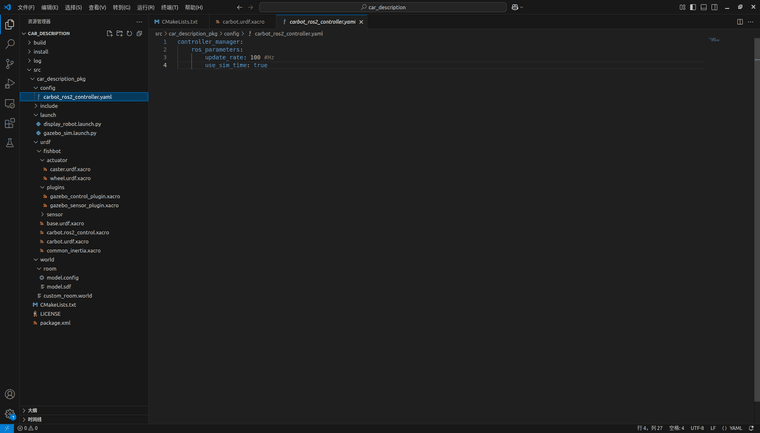
fishbot_ros2_controller.yaml ,
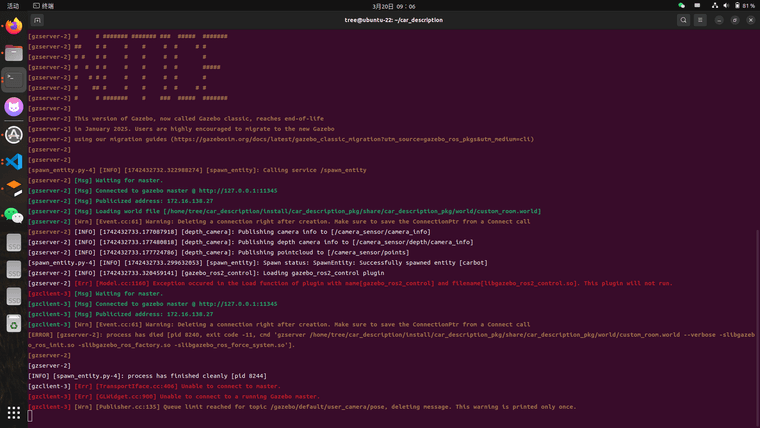
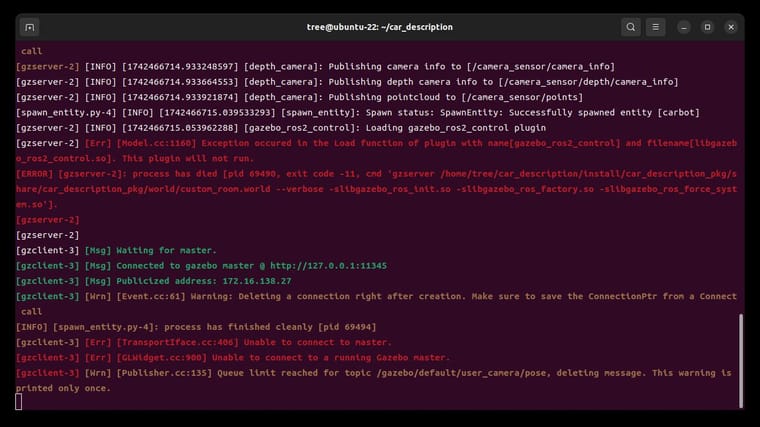
CMakeLists.txt报错信息:[Err] [Model.cc:1160] Exception occured in the Load function of plugin with name[gazebo_ros2_control] and filename[libgazebo_ros2_control.so]. This plugin will not run.
1、使用的是ubuntu22.04 真机,python3.10.12, Gazebo 11.10.2 ,ros2是humble版
2、使用gazebo的两轮差速插件时,启动gazebo和rviz2都没有问题,报错出现在换成ros2_control控制之后。从报错日志可以看出机器人和传感器插件都正常加载了,加载gazebo_ros2_control时就出问题。
3、我下载了小鱼书籍代码的chapt6_ws,可以正常启动gazebo,应该不是有插件忘记安装或gazebo和ros2版本不适配。 -
昨天看报错看了一天,代码反复看了很多遍,问过chatgpt和deepseek,求路过的朋友帮帮我
-
@Tree 用一下我放gitee上的代码试试呢
-
@小鱼 chapt6_ws就是你gitee上的代码。。我想到办法了,一点点用你的代码替换我的,应该能找到报错的原因
-
@Tree 还有可能是环境原因哦,先直接用我的代码试试
-
@小鱼 你的代码可以正常运行,没有报错。另外我把colcon构建出来的文件删掉,重启打开终端构建工作空间后报错多了一条
 file:///home/tree/文档/xwechat_files/wxid_40579izps63s22_334a/temp/2025-03/RWTemp/9e20f478899dc29eb19741386f9343c8/37ee77fac7284dbfdd9c6fe2dc0b97c0.jpg
file:///home/tree/文档/xwechat_files/wxid_40579izps63s22_334a/temp/2025-03/RWTemp/9e20f478899dc29eb19741386f9343c8/37ee77fac7284dbfdd9c6fe2dc0b97c0.jpg
似乎是说world相关的问题,但是我用gazebo自己的两轮差速插件的时候world是正常加载的 -
@小鱼 我找到问题了,,config下的.yaml文件,那个ros__parameters是双下划线,我写的ros_parameters 只写了一个下划线。感谢回复
-
