导航无法启动
-

出现上图所示问题,点击2Dpose 没有任何反应。
系统ubuntu22.04 humble
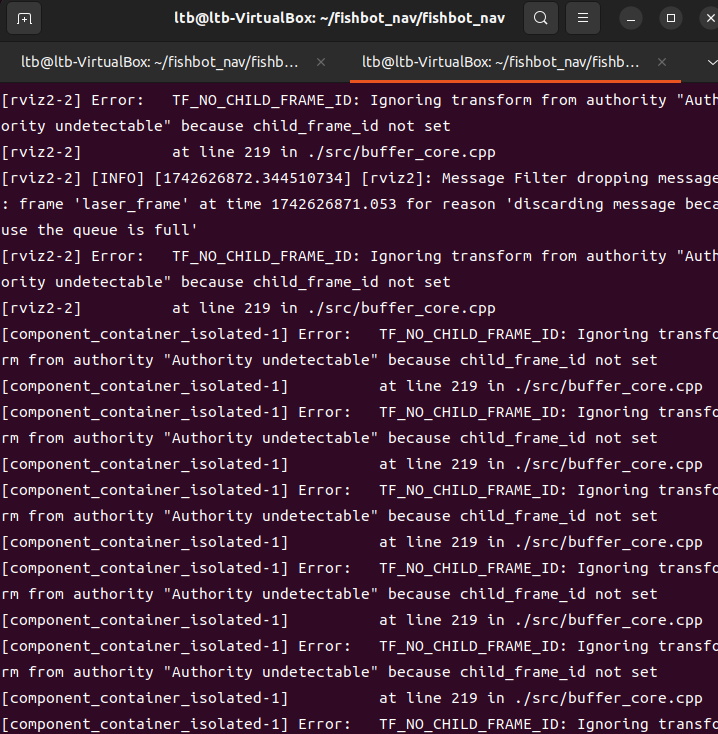
最后一张图报错的代码如下所示:
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[component_container_isolated-1] Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "Authority undetectable" because child_frame_id not set
[component_container_isolated-1] at line 219 in ./src/buffer_core.cpp
[ERROR] [component_container_isolated-1]: process[component_container_isolated-1] failed to terminate '10.0' seconds after receiving 'SIGTERM', escalating to 'SIGKILL'
[INFO] [component_container_isolated-1]: sending signal 'SIGKILL' to process[component_container_isolated-1]
[component_container_isolated-1] [INFO] [1742627108.580889425] [amcl]: Message Filter dropping message: frame 'laser_frame' at time 1742627107.467 for reason 'the timestamp on the message is earlier than all the data in the transform cache'
[ERROR] [component_container_isolated-1]: process has died [pid 17535, exit code -9, cmd '/opt/ros/humble/lib/rclcpp_components/component_container_isolated --ros-args --log-level info --ros-args -r __node:=nav2_container --params-file /tmp/launch_params_hki1tnpx --params-file /tmp/launch_params_j48p6uqt -r /tf:=tf -r /tf_static:=tf_static']. -
@2447827413 代码为第一张图报错的内容
-
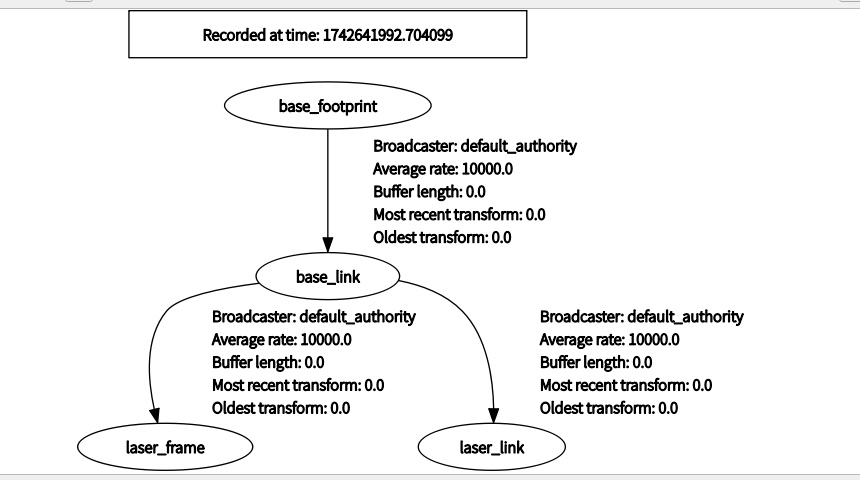
@2447827413 看一下rqt_tf_tree
-
@小鱼!
-
@小鱼 鱼哥这怎么解决呢?
-
@2447827413 里程计部分咋没了