fishBot四驱v2的在platformio的新建board需要选择哪个类型
-
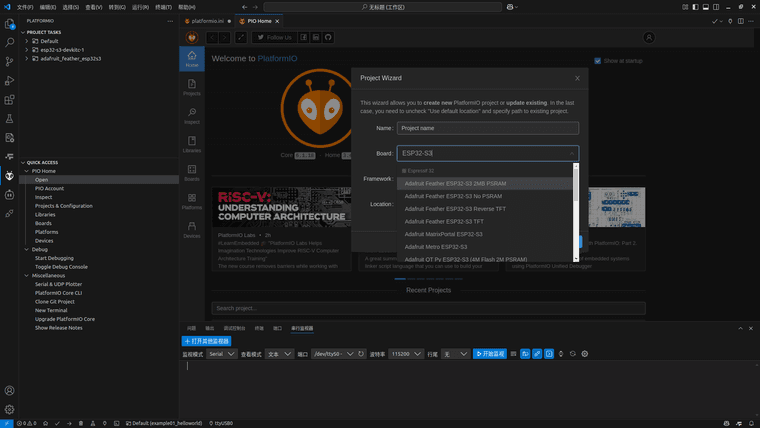
Adafruit Feather ESP32-S3 2MB PSRAM
Adafruit Feather ESP32-S3 No PSRAM
Adafruit Feather ESP32-S3 Reverse TFT
Adafruit Feather ESP32-S3 TFT
是在上边选哪个芯片型号? -
@小鱼 刚学到这里不知道如何选择,已经阅读四驱PDF文档,PDF文档教程是:git之后,再新建project都要复制之前的project,而不是自己选择!希望可以自己选择建立project,所以board应该选择什么?
淘宝问客服建议在社区问您,谢谢pdf
-
@Swansea 问题未解决,选择fishbot_motion_control_four_driver_v2(fishros)后,报错如下Could not initialize project
PIO Core Call Error: "Usage: platformio init [OPTIONS]\nTry 'platformio init -h' for help.\n\nError: Invalid value for '-b' / '--board':fishbot_motion_control_four_driver_v2. Please search for board ID usingplatformio boardscommand" -
@Swansea 建议用工程模板,四驱版的类型从这里选不到,我自己写了个板子的定义在模板工程里