ROS2 jazzy 中moveit2 setup assisstant中虚拟关节无法链接 组为空
-
wsl2环境 ROS2 jazzy版本 ubuntu24
我使用的是官方教程,导入的udrf文件为panda_arm的udrf文件,按照官方教程操作,网址如下
https://moveit.picknik.ai/main/doc/examples/setup_assistant/setup_assistant_tutorial.html我遇到了如下问题,我使用moveit setup assisstant时在设置虚拟关节时终端显示以下错误
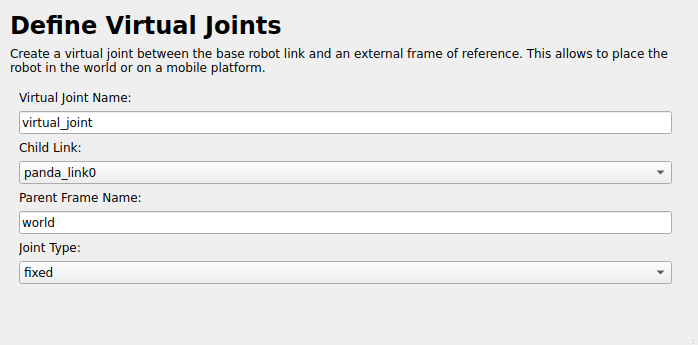
[moveit_setup_assistant-1] Error: Virtual joint does not attach to a link on the robot (link '' is not known) [moveit_setup_assistant-1] at line 104 in ./src/model.cpp [moveit_setup_assistant-1] [INFO] [1742974000.172193048] [moveit_3411427826.moveit.core.robot_model]: Loading robot model 'panda'... [moveit_setup_assistant-1] [INFO] [1742974000.172260176] [moveit_3411427826.moveit.core.robot_model]: No root/virtual joint specified in SRDF. Assuming fixed joint
此外,我在定义规划组的时候,在点击
Add Joints的时候,终端出现错误提示,我并不理解这是为什么
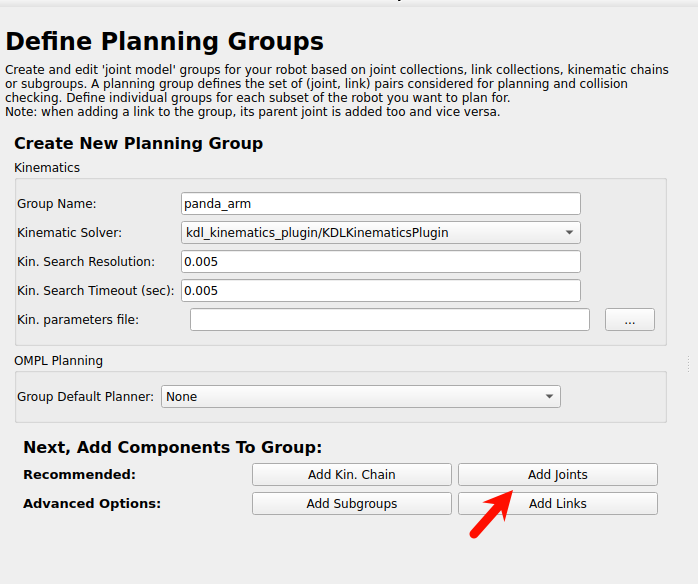
并且我在点击添加关节后点击保存,终端出现报错:
[moveit_setup_assistant-1] Warning: Group 'panda_arm' is empty. [moveit_setup_assistant-1] at line 262 in ./src/model.cpp [moveit_setup_assistant-1] [INFO] [1742974235.032554245] [moveit_3411427826.moveit.core.robot_model]: Loading robot model 'panda'... [moveit_setup_assistant-1] [WARN] [1742974235.040723479] [moveit_3411427826.moveit.core.robot_model]: Group 'panda_arm' must have at least one valid joint [moveit_setup_assistant-1] [WARN] [1742974235.040786511] [moveit_3411427826.moveit.core.robot_model]: Failed to add group 'panda_arm'后来添加了机器人手部的links,但依然报错
最后在设置姿态修改关节角度时直接卡退
moveit_setup_assistant: /home/maikie/Desktop/ws_moveit/src/moveit2/moveit_core/robot_state/include/moveit/robot_state/robot_state.hpp:1305: const Eigen::Isometry3d& moveit::core::RobotState::getCollisionBodyTransform(const moveit::core::LinkModel*, std::size_t) const: Assertion `checkCollisionTransforms()' failed.