在一个launch文件中启动多个launch文件报错,No such file or directory: ''
-
1、使用的是ubuntu22.04 真机,python3.10.12, Gazebo 11.10.2 ,ros2是humble版
2、问题描述:书籍第七章的巡检机器人小项目中,每次需要分别运行
ros2 launch fishbot_description gazebo_sim.launch.py
ros2 launch fishbot_navigation2 navigation2.launch.py
ros2 launch autopatrol_robot autopatrol.launch.py
来启动巡检仿真功能,我想在一个launch文件中包含这3个launch文件,出现报错,但是注释掉另外两个,只启动一个launch文件就能正常工作
3、实在想不到原因,已经问过chatgpt和deepseek
报错
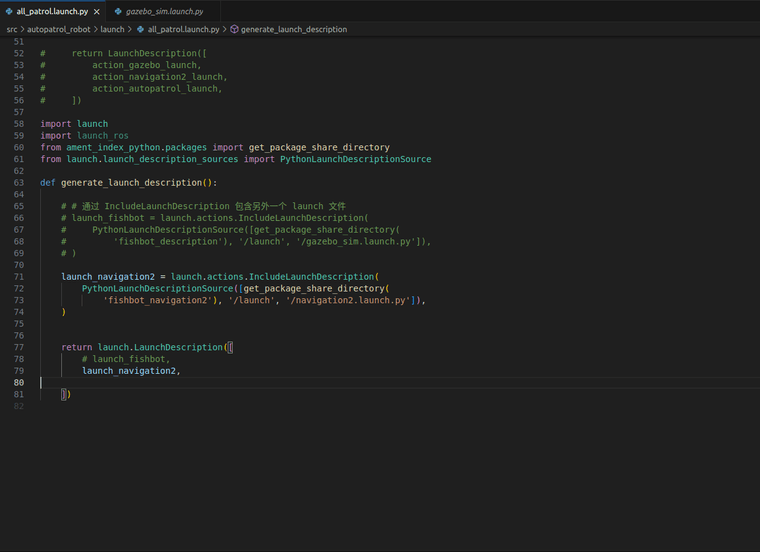
注释掉gazebo_sim.launch.py

注释掉gazebo_sim.launch.py

同时启动两个launch文件 -
直接在小鱼的书籍代码chapt7_ws里面写的,除了自己写的这个launch文件外,其他部分都没有改动过
-
蹲个大佬回复,我也是这样,把launch_navigatiton2那个launch注释之后,也能正常启动gazebo、autopatrol和speaker三个文件,就是rviz2那个launch文件一加载进来报错