rviz中执行轨迹规划提示:Controller 'arm_controller' failed with error PATH_TOLERANCE_VIOLATED:
-
ros仿真
ur5+夹爪
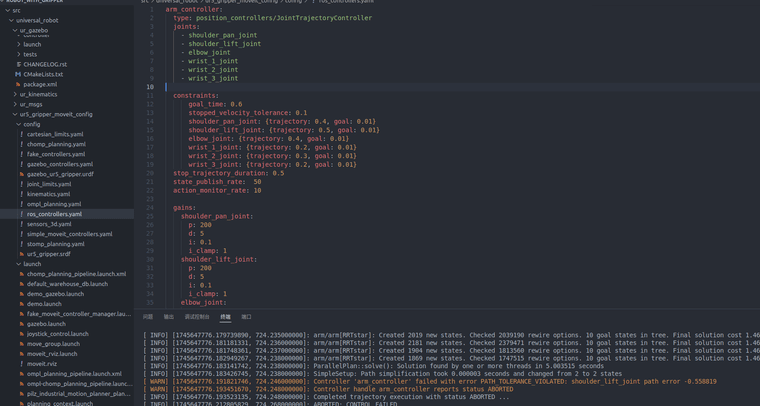
仿真是用的官方的ur5-1.2.7版本的模型包,我在加入robotiq_85夹爪后,启动rviz,在motoinplanning插件中拖动轨迹球,轨迹可以规划,但执行失败,提示图片中的的警告。我看本社区这个人的帖子他的解决办法是控制调调参,但我总也调不好,【https://fishros.org.cn/forum/topic/528/机械臂rviz-gazebo联合仿真报错】 所以我不知道是不是真的是因为参数导致轨迹无法执行的问题。或者有没有人调过参数,分享一下。这个问题我已经卡在这里很久了