Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
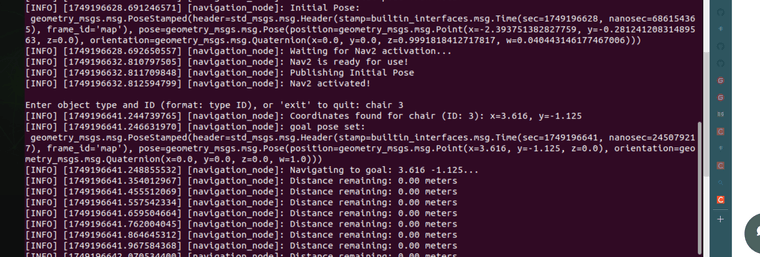
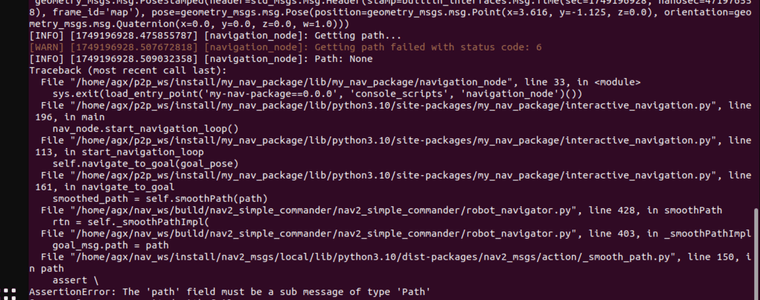
目前可以通过Rviz2中手动标记目标点实现导航,但是我想用Nav2的API simple_commander实现导航,gotoPose和followPath方法都尝试了,分别有不同的报错: gotoPose:开始导航后显示距离目标点的距离是0,机器人也开始转圈,转了几秒之后就显示导航失败。Rviz中的机器人模型也在一直旋转 followPath:无法生成正常的路径 位置初始化我订阅了/initialpose话题,通过rivz2的2D pose Estimation给定位置。 调用API的代码如下图: