此处是否为rviz2的BUG?
-
系统
Ubuntu22.04
使用的是小鱼的一键配置docker环境
ROS版本
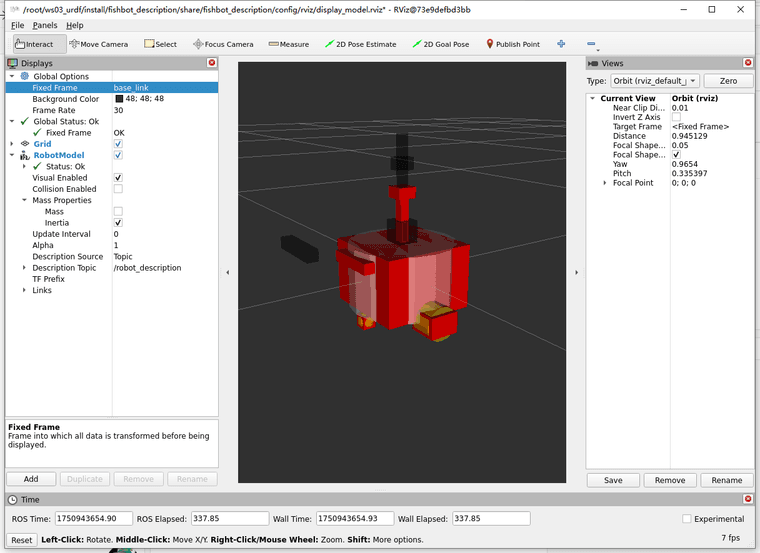
humble跟着小鱼教学视频做的第六章的小车,camera、laser、IMU在rivz里显示的xyz偏移和设置的不一样,但是点开显示他们的惯性和质量却都是正确的。图里可见红色的惯性方块,是正确的,但是黑色实体的却飞出去了。
<?xml version="1.0"?> <robot xmlns:xacro="http://www.ros.org/wiki/xacro" > <xacro:include filename="$(find fishbot_description)/urdf/fishbot/common_inertia.xacro"/> <!--机器人身体部分--> <xacro:macro name = "camera_xacro" params="xyz"> <link name="camera_link"> <!--部件外观描述--> <visual> <!--偏移和旋转--> <origin xyz="${xyz}" rpy="0.0 0.0 0.0"/> <!--形状--> <geometry> <box size="0.02 0.1 0.02"/> </geometry> <!--颜色--> <material name = "black"> <color rgba="0 0 0 0.5"/> </material> </visual> <collision> <origin xyz="${xyz}" rpy="0.0 0.0 0.0"/> <!--形状--> <geometry> <box size="0.02 0.1 0.02"/> </geometry> <!--颜色--> <material name = "black"> <color rgba="0 0 0 0.5"/> </material> </collision> <xacro:box_inertia m="0.1" w="0.02" h="0.1" d="0.02"/> </link> <joint name="camera_joint" type="fixed"> <origin xyz="${xyz}" rpy="0.0 0.0 0.0"/> <parent link="base_link"/> <child link="camera_link"/> </joint> </xacro:macro> </robot>