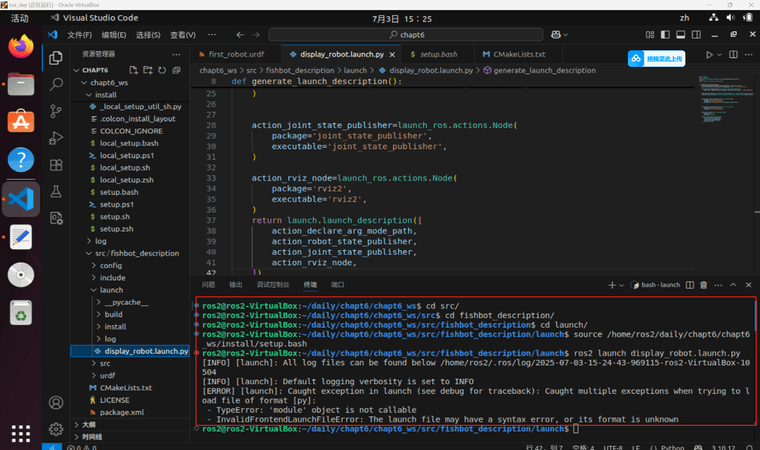
老师,b站视频课6.2.2,这里我按照视频里的代码写的,但是在执行的时候报错了
-
下面是我的代码
import launch
import launch_ros
from ament_index_python.packages import get_package_share_directory
import os
import launch_ros.parameter_descriptionsdef generate_launch_description():
urdf_package_path=get_package_share_directory('fishbot_description')
default_urdf_path=os.path.join(urdf_package_path,'urdf','first_robot.urdf')action_declare_arg_mode_path=launch.actions.DeclareLaunchArgument( name='model',default_value=str(default_urdf_path),description='加载的模型文件路径' ) substitutions_result=launch.substitutions.Command(['cat ',launch.substitutions.launch_configuration('model')]) robot_description_value=launch_ros.parameter_descriptions.ParameterValue(substitutions_result,value_type=str) action_robot_state_publisher=launch_ros.actions.Node( package='robot_state_publisher', executable='robot_state_publisher', parameters=[{'robot_description':robot_description_value}] ) action_joint_state_publisher=launch_ros.actions.Node( package='joint_state_publisher', executable='joint_state_publisher', ) action_rviz_node=launch_ros.actions.Node( package='rviz2', executable='rviz2', ) return launch.launch_description([ action_declare_arg_mode_path, action_robot_state_publisher, action_joint_state_publisher, action_rviz_node, ])