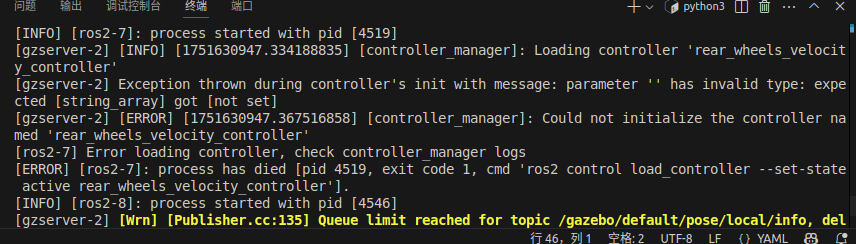
为什么四轮的添加阿克曼一直报错未初始化
-
 controller_manager:
controller_manager:
ros__parameters:
update_rate: 100 # Hz
use_sim_time: true
fishbot_joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
use_sim_time: true
update_rate: 50
rear_wheels_velocity_controller:
type: ackermann_steering_controller/AckermannSteeringController# left_wheel: "lbj" # 后左轮关节名 # right_wheel: "rbj" # 后右轮关节名 # left_steering: "lftj" # 前轮转向关节 # right_steering: "rftj" #front_steering_joints: ["lftj", "rftj"] # 必须匹配 URDF rear_wheel_joints: ["rbj", "lbj"] front_wheel_joints: ["rfj", "lfj"] wheelbase: 0.63 # 前后轮轴距(米) wheel_radius: 0.075 wheel_separation: 0.88 # 左右轮距(米) max_steer_angle: 0.52 cmd_vel_topic: "/cmd_vel" # 订阅的cmd_vel话题 odom_topic: "/odom" # 发布的里程计话题 odom_frame_id: odom base_frame_id: base_footprint pose_covariance_diagonal: [0.001, 0.001, 0.0, 0.0, 0.0, 0.01] twist_covariance_diagonal: [0.001, 0.0, 0.0, 0.0, 0.0, 0.01] enable_odom_tf: true # 启用odom到base_link的TF变换 cmd_vel_timeout: 0.5 # 指令超时时间(秒) publish_rate: 50.0 # 发布频率(Hz) use_stamped_vel: false # 不使用时间戳速度指令 open_loop: true # 前轮转向控制器(位置控制) fishbot_front_wheels_position_controller: type: position_controllers/JointGroupPositionControllerfishbot_front_wheels_position_controller:
ros__parameters:joints: ["lftj","rftj"] command_interfaces: ["position"] state_interfaces: ["position"]