4.2.3人脸检测服务实现章节
-
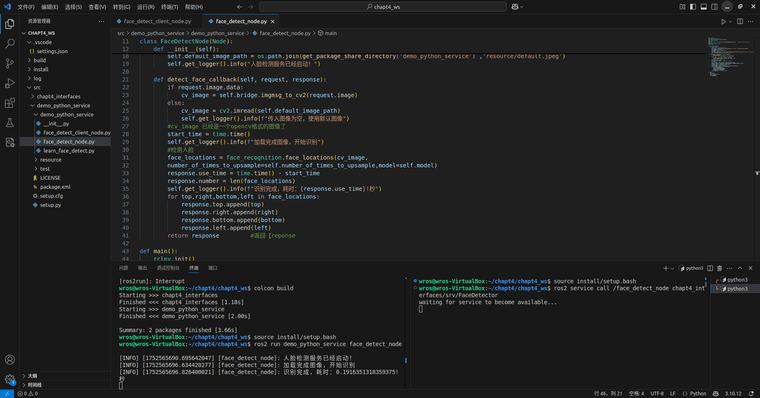
为什么下面一直在等待?源码
import rclpy
from rclpy.node import Node
from chapt4_interfaces.srv import FaceDetector
import face_recognition
import cv2
from ament_index_python.packages import get_package_share_directory #获取功能包share目录绝对路径
import os
from cv_bridge import CvBridge
import timeclass FaceDetectNode(Node):
def init(self):
super().init('face_detect_node')
self.service_ = self.create_service(FaceDetector,'face_detect',self.detect_face_callback)
self.bridge = CvBridge()
self.number_of_times_to_upsample = 1
self.model = 'hog'
self.default_image_path = os.path.join(get_package_share_directory('demo_python_service') ,'resource/default.jpeg')
self.get_logger().info("人脸检测服务已经启动!")def detect_face_callback(self, request, response): if request.image.data: cv_image = self.bridge.imgmsg_to_cv2(request.image) else: cv_image = cv2.imread(self.default_image_path) self.get_logger().info(f"传入图像为空,使用默认图像") #cv_image 已经是一个opencv格式的图像了 start_time = time.time() self.get_logger().info(f"加载完成图像,开始识别") #检测人脸 face_locations = face_recognition.face_locations(cv_image, number_of_times_to_upsample=self.number_of_times_to_upsample,model=self.model) response.use_time = time.time() - start_time response.number = len(face_locations) self.get_logger().info(f"识别完成,耗时:{response.use_time}!秒") for top,right,bottom,left in face_locations: response.top.append(top) response.right.append(right) response.bottom.append(bottom) response.left.append(left) return response #返回【reponsedef main():
rclpy.init()
node = FaceDetectNode()
rclpy.spin(node)
rclpy.shutdown()