9.0.6.1 雷达驱动与建图测试(无线tcp)
-
一、手动切换模式
配置助手配置雷达时net_mode默认为tcp
当配置完成后,需要将跳线帽调整到WIFI模式,这样雷达板将会把来自雷达的数据通过wifi转发给tcp服务。
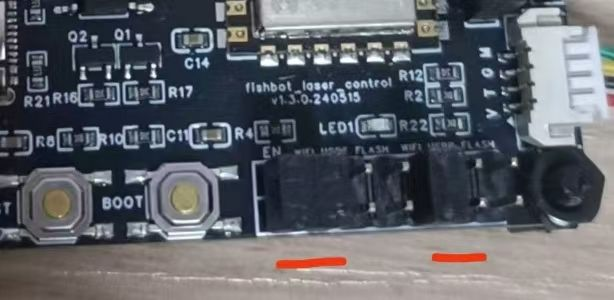
调整完后,跳线帽接法如上图所示。
二、启动服务
打开电脑,输入下面的指令,我们使用docker来下载雷达相关的驱动。
xhost + && sudo docker run -it --rm -p 8889:8889 -p 8889:8889/udp -v /dev:/dev -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser下载完成后,你可以看到下面的界面

三、驱动测试
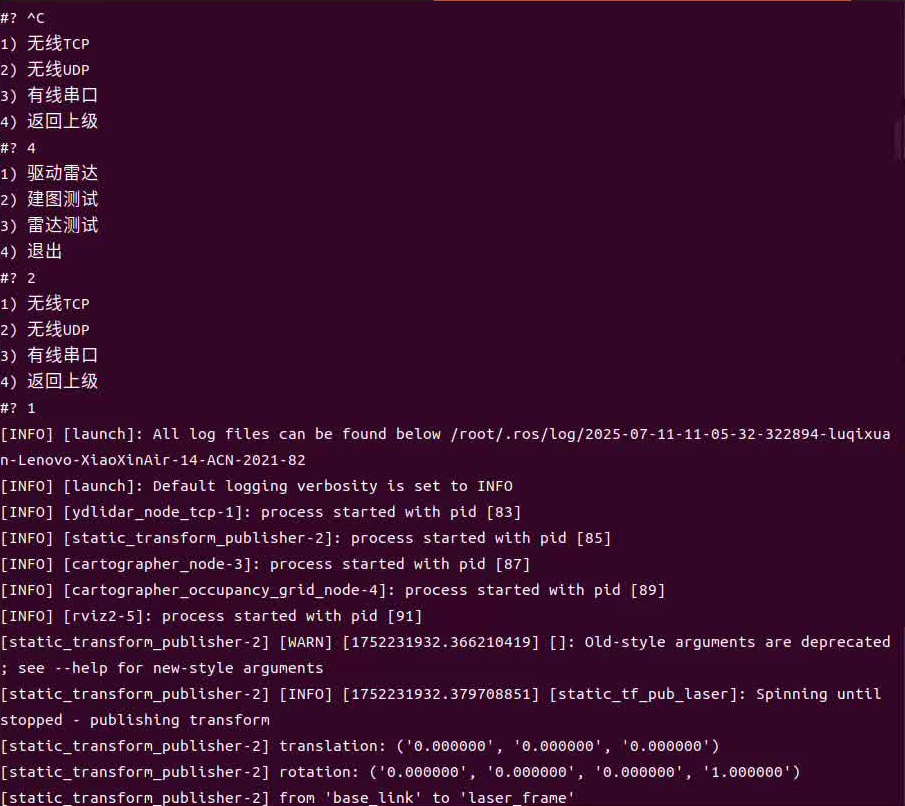
保持雷达板在通电状态,输入1,回车,选择1无线tcp,我们尝试驱动雷达
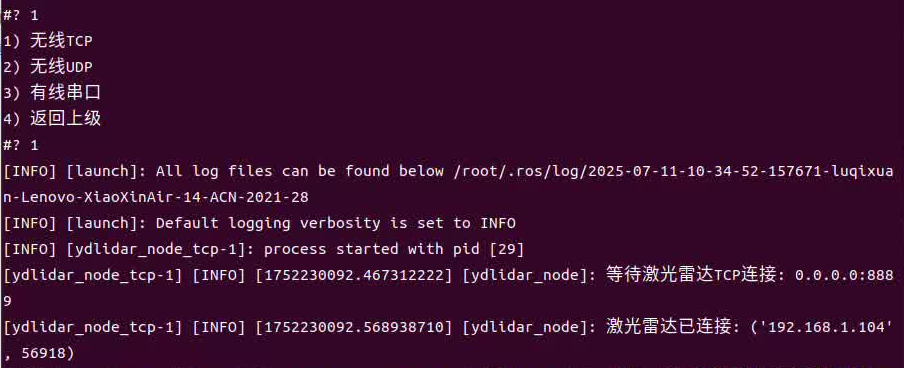
看到上述界面,表示驱动成功。
如果没有看到上述界面,请检查是否符合下述现象和问题:- 蓝色LED灯长亮,表示此时在配置模式,请将跳线帽调整至运行模式,LED闪烁表示在运行模式
- 出现timout count提示,表示雷达板没有数据发送到的电脑,此时应该检查跳线帽是否在WIFI模式,并确定连接了雷达。
驱动成功后,我们可以打开一个新的终端,输入ros2 topic list,查看是否有scan话题。
ros2 topic list
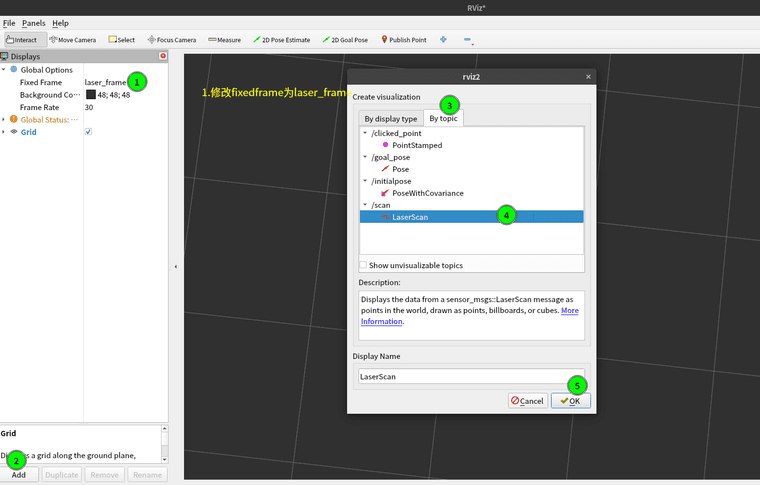
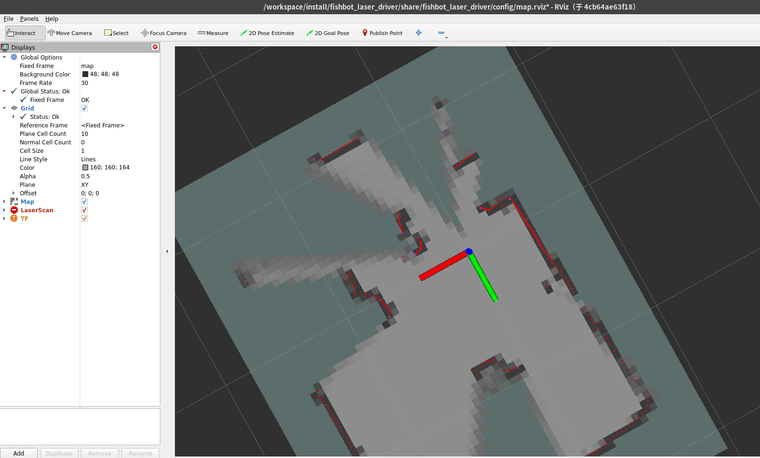
在rviz中可视化点云数据:
此时打开rviz2,左下角点击add---by topic,添加LaserScan,并修改fixed frame为laser_frame
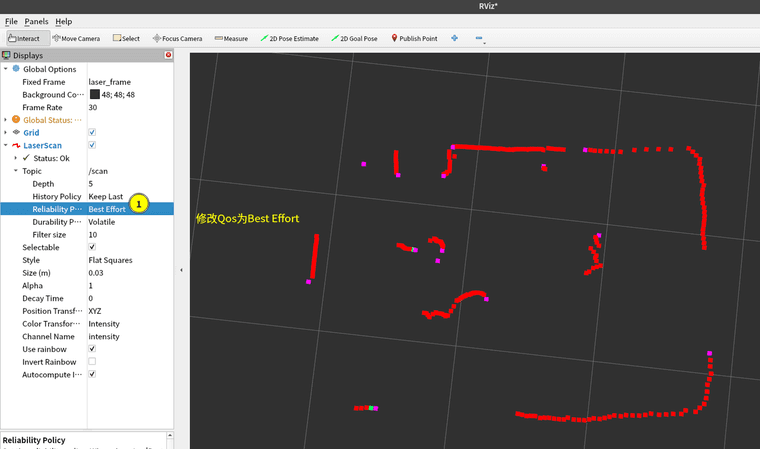
修改Qos为Best Effort,接着就能看到雷达的点云数据了
移动雷达,观察点云的变化
四、手动建图测试
使用Crtl+C,打断驱动的运行,回车,
选择4返回上级
选择2建图测试
选择1无线tcp
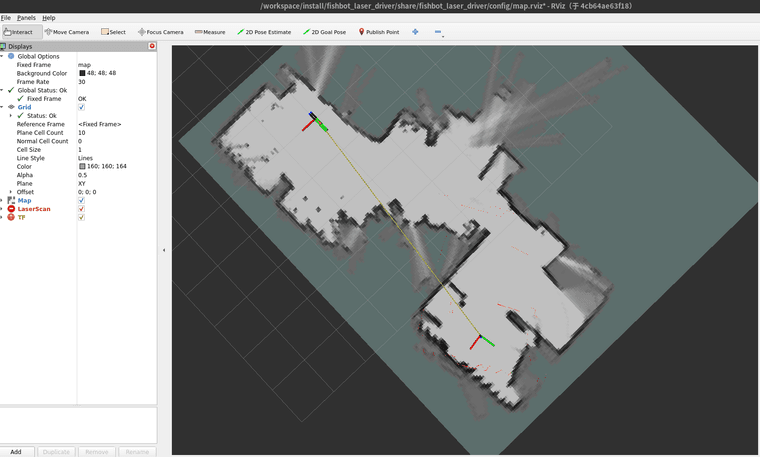
等待片刻,你应该可以直接看到一张地图出现
你可以将FishBot放到地上,或者用手拿着fishbot,慢慢走一圈,观察地图的变化,也可以直接用键盘控制节点(需要根据上节教程个启动Agent)控制fishbot走一圈,看看能否得到完整的地图。
五、保存地图
我们需要使用一个叫做nav2_map_server的工具。
安装nav2_map_serversudo apt install ros-$ROS_DISTRO-nav2-map-server保存地图
ros2 run nav2_map_server map_saver_cli --help可以看到有下面的用法
Usage: map_saver_cli [arguments] [--ros-args ROS remapping args] Arguments: -h/--help -t <map_topic> -f <mapname> --occ <threshold_occupied> --free <threshold_free> --fmt <image_format> --mode trinary(default)/scale/raw NOTE: --ros-args should be passed at the end of command line我们的地图话题为map,文件名字我们用fishbot_map,所以有下面这个这样写的命令行。
ros2 run nav2_map_server map_saver_cli -t map -f fishbot_map
接着我们就可以得到下面的两个文件. ├── fishbot_map.pgm └── fishbot_map.yaml 0 directories, 2 files这两个文件就是对当前地图保存下来的文件,其中.pgm是地图的数据文件,.yaml后缀的是地图的描述文件。
-
 小 小鱼 在 中 引用了 这个主题
小 小鱼 在 中 引用了 这个主题
-
连接成功并进入建图模式,但是rviz没有显示地图怎么进行设置
-
小 小鱼 在 中 引用了 这个主题