fisbot仿真nav2导航时局部地图相关问题
-
标题:[nav2导航时,局部地图异常偏移,导致导航失败]
问题描述:
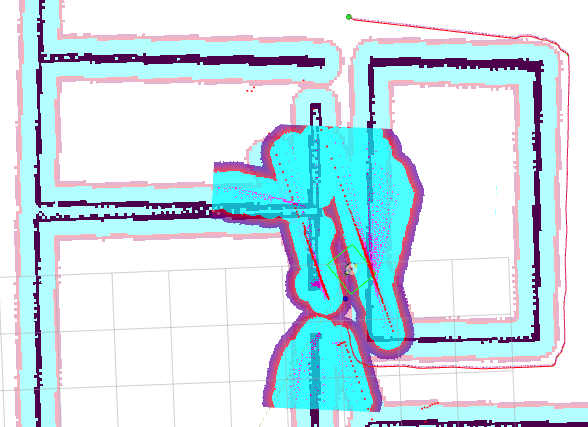
[自己用gazebo创建了个环境,用nav2进行导航, 给定目标点后,小车在行走过程中,局部膨胀地图随着激光雷达出现了偏移,将路线给挡住了,导致导航失败]
具体细节和上下文:
1,机器人的仿真模型是根据鱼哥的视频一步步走下来的;
2.我的param.yaml对全局和局部的配置如下:
2.1 全局配置:
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 2.0 #1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_footprint
use_sim_time: True
# robot_radius: 0.2
footprint: "[[0.325,-0.275],[0.325,0.275],[-0.325,0.275],[-0.325,-0.275]]"
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 6.0 #3.0
inflation_radius: 0.35 #0.15
always_send_full_costmap: True2.2 局部配置:
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 2.0 #2.0 #5.0
publish_frequency: 0.5 #2.0
global_frame: odom
robot_base_frame: base_footprint
use_sim_time: True
rolling_window: true
width: 5 #3
height: 5 #3
resolution: 0.02 #0.05
robot_radius: 0.46 #robot_radius: 0.2
footprint: "[[0.325,-0.275],[0.325,0.275],[-0.325,0.275],[-0.325,-0.275]]"
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 6.0 #3.0
inflation_radius: 0.45 #0.35 # 0.2 #0.15
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
always_send_full_costmap: True- 出现异常的图片:
尝试过的解决方法:
我尝试将全局和局部地图的更新频率设置成一样的,但是没有效果。不知道是什么原因,求大佬帮忙分析下。
- 出现异常的图片: