rosdepc安装失败
-
ROS相关:
[1]:一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
[3]:一键安装:rosdep(小鱼的rosdepc,又快又好用)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[9]:一键安装:Cartographer(18 20测试通过,16未测. updateTime 20240125)
[11]:一键安装:ROS Docker版(支持所有版本ROS/ROS2)
[16]:一键安装:系统自带ROS (!!警告!!仅供特殊情况下使用)常用软件:
[2]:一键安装:github桌面版(小鱼常用的github客户端)
[6]:一键安装:NodeJS环境
[7]:一键安装:VsCode开发工具
[8]:一键安装:Docker
[10]:一键安装:微信(可以在Linux上使用的微信)
[12]:一键安装:PlateformIO MicroROS开发环境(支持Fishbot)
[15]:一键安装:QQ for Linux配置工具:
[5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
[13]:一键配置:python国内源
[17]:一键配置: Docker代理(支持VPN+代理服务两种模式)请输入[]内的数字以选择:3
Run CMD Task:[wget http://mirror.fishros.com/install/tools/tool_config_rosdep.py -O /tmp/fishinstall/tools/tool_config_rosdep.py --no-check-certificate]
[-][0.03s] CMD Result:success 80... 已连接。sdep.py欢迎使用模板工程,本工具由作者小鱼提供
Run CMD Task:[sudo apt install python3-pip -y]
[-][0.50s] CMD Result:success 个软件包未被升级。请选择要使用的pip源:
RUN Choose Task:[请输入括号内的数字]
请选择pip源:
[1]:清华源 - https://pypi.tuna.tsinghua.edu.cn/simple
[2]:阿里云 - https://mirrors.aliyun.com/pypi/simple
[3]:中国科技大学 - https://pypi.mirrors.ustc.edu.cn/simple
[4]:华为云 - https://repo.huaweicloud.com/repository/pypi/simple
0:quit
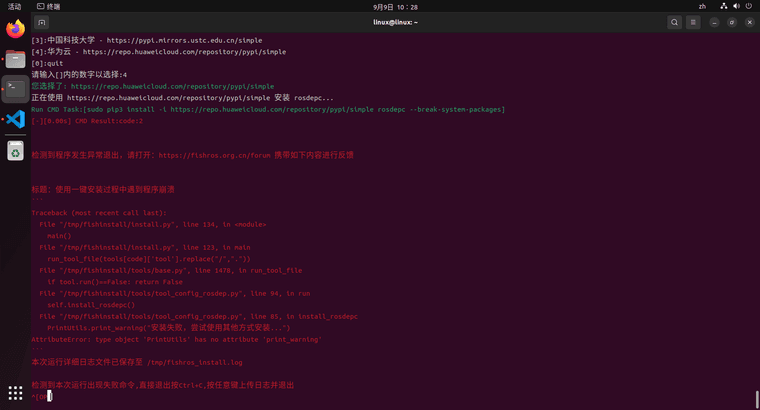
请输入[]内的数字以选择:4
您选择了: https://repo.huaweicloud.com/repository/pypi/simple
正在使用 https://repo.huaweicloud.com/repository/pypi/simple 安装 rosdepc...
Run CMD Task:[sudo pip3 install -i https://repo.huaweicloud.com/repository/pypi/simple rosdepc --break-system-packages]
[-][0.00s] CMD Result:code:2检测到程序发生异常退出,请打开:https://fishros.org.cn/forum 携带如下内容进行反馈
标题:使用一键安装过程中遇到程序崩溃
Traceback (most recent call last): File "/tmp/fishinstall/install.py", line 134, in <module> main() File "/tmp/fishinstall/install.py", line 123, in main run_tool_file(tools[code]['tool'].replace("/",".")) File "/tmp/fishinstall/tools/base.py", line 1478, in run_tool_file if tool.run()==False: return False File "/tmp/fishinstall/tools/tool_config_rosdep.py", line 94, in run self.install_rosdepc() File "/tmp/fishinstall/tools/tool_config_rosdep.py", line 85, in install_rosdepc PrintUtils.print_warning("安装失败,尝试使用其他方式安装...") AttributeError: type object 'PrintUtils' has no attribute 'print_warning'本次运行详细日志文件已保存至 /tmp/fishros_install.log
检测到本次运行出现失败命令,直接退出按Ctrl+C,按任意键上传日志并退出
-
参考一些技术博客,手动修改rosdep2/sources_list.py、rosdistro/init.py、rosdep2/gbpdistro_support.py、rosdep2/rep3.py里面的国外路径安装了