使用move_base多点导航卡顿 不准等问题
-
在实际场景规划时,使用move_base导航,小车出现乱撞,卡顿等问题。
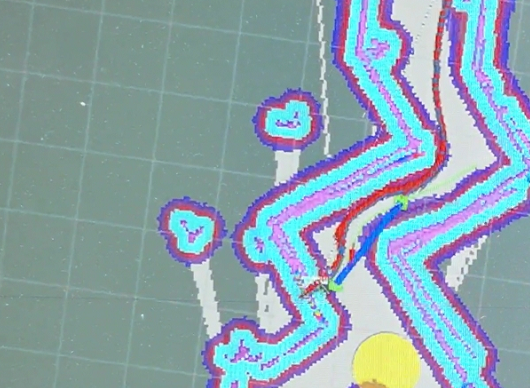
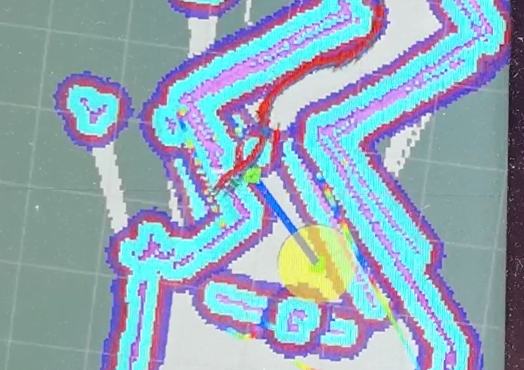
上图为撞墙前的规划 下图为撞墙后规划出的路线
底盘为阿克曼结构 全局规划使用A* 局部规划使用DWA规划器。 -
追 追逐我的明天 将这个主题转为问答主题,在
-
@追逐我的明天 感觉是撞的时候把定位丢了的样子,减慢速度,增大下膨胀半径试试。
-
@小鱼 在到达第一个点后间隔一段时间才规划出到第二点的路径,在这段时间内小车会乱撞
-
@小鱼 使用a*单点导航规划的路径会撞墙 请问如何调节参数
-
@追逐我的明天 车很大,路很窄,要想解决就两条路,规划时距离障碍物远一些,路径跟踪时跟着紧一些。
关于乱撞,个人觉得不一定是乱撞,规划的路线或者下发的直径是否到障碍物里了。
-
@小鱼 路径规划应该没有太大问题 但是在跟随上偏差比较大


跟随应该如何优化呢