关于moveit在笛卡尔规划发生碰撞的求助
-
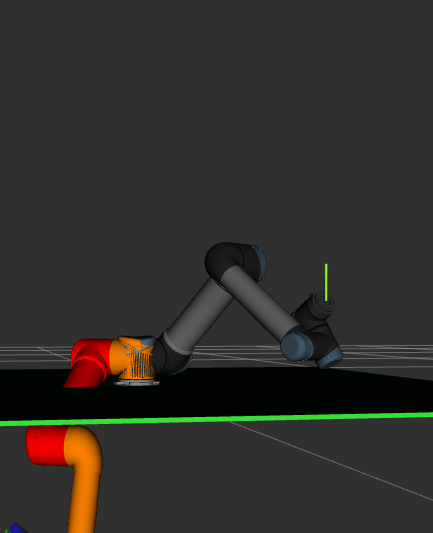
用的moveit_group的api,然后用planning_scene_interface添加工作空间,然后机器人在采用computeCartesianPath规划时,机器人末端在会避让障碍,但是本体会撞。就和图上一样尝试往下做笛卡尔直线规划时,就往障碍物底下穿了。
-
不是拖拽的,所以那个拖拽的机械臂只是为了不挡视野
-
- 检查模型碰撞是否和visual匹配
- 检查障碍物是否正确发布到规划场景中
-
@小鱼
我设定的机器人底座的板远大于机器臂的可达范围,关节空间的规划或者笛卡尔规划中机械臂末端靠近底座的板的时候会因为碰撞而规划失败,所以为猜测应该是已经发布成功了,我不知道怎么查障碍物是否正确发布。现在的症状是,如图机械末端高于部分本体时,当用computeCartesianPath机械往下时,本体就从板子往下钻,显示规划成功,实际发生了碰撞;当末端为最低时,能正常的直接规划失败。
moveit_msgs::msg::CollisionObject object;
object.id = "board";
object.header.frame_id = "world";
object.primitives.resize(1);
object.primitives[0].type = shape_msgs::msg::SolidPrimitive::BOX;
object.primitives[0].dimensions = { 2.0, 2.0,0.01 };geometry_msgs::msg::Pose pose;
pose.position.x = 0.0;
pose.position.y = 0.0;
pose.position.z = 0.0;
object.pose = pose;planning_scene_interface.applyCollisionObject(object);
-
@hew 请问您在使用computeCartesianPath进行路径规划的时候是否会出现 fraction 的值很低的情况,我的多路点规划 fraction 只有0.5几