Moveit2 怎么在Rviz里面直接显示机械臂末端轨迹?
-
我目前实现显示末端轨迹的方法是通过
moveit_visual_tools::MoveItVisualTools visual_tools(move_group_node, "base_link", "move_group_tutorial", move_group.getRobotModel()); visual_tools.publishPath(path, rvt::BLUE, 0.005);来实现相关功能的,但是我发现当机械臂模型没有定义末端执行器(end effector)的时候是不能直接使用像
visual_tools.publishTrajectoryLine(my_plan.trajectory_, joint_model_group);这样获取的(不知道是不是bug)。
我记得rviz可以直接设置Show Trail来显示末端轨迹的,但是在MotionPlanning里面的Planned Path没有用,RobotModel里面也没有找到,想问问大家是怎么显示轨迹的。
版本ROS2 humble -
@空白
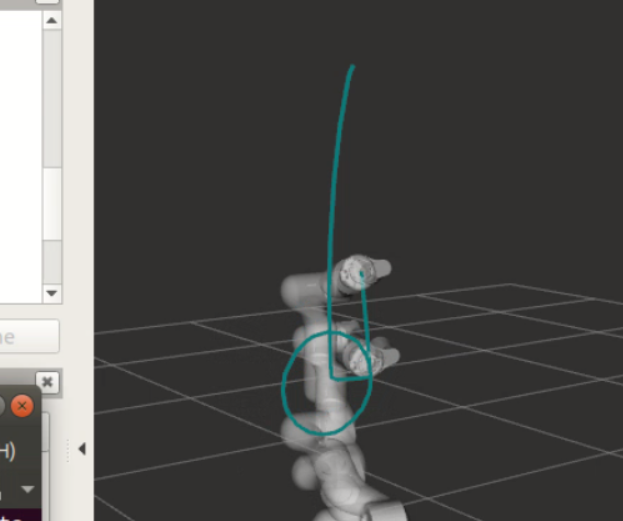
像是这样子显示 -
 空 空白 将这个主题转为问答主题,在
空 空白 将这个主题转为问答主题,在
-
@空白 找到了,在MotionPlanning->Scene Robot里的Show Trail里面
-
空 空白 将这个主题标记为已解决,在