@小鱼 键盘控制正常的,代价地图我不清楚怎样才算正常,反正点击Rviz2工具栏——2D Pose Estimate,然后在地图上点个目标点并选择方向后,全局代价地图以及被地代价地图以及激光在地图上都标记出来了,这样算算正常嘛?
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
1923825015 发布的最新帖子
-
RE: [FishBot教程]7. FishBot-Nav2导航测试发布在 FishBot机器人
-
RE: [FishBot教程]7. FishBot-Nav2导航测试发布在 FishBot机器人
@小鱼 哥,具体的排查方法有吗?图我已经建了不低于三个了,然后系统我也重装了两次了,至于接线的话,我平装好之后就没动过线,反正到现在导航就是不行,每次导航,小车就在原地转圈,只有把小车电源关闭了,才能停下来。能帮我解决一下嘛 求求了。
-
RE: [FishBot教程]7. FishBot-Nav2导航测试发布在 FishBot机器人
@小鱼 在 [FishBot教程]7. FishBot-Nav2导航测试 中说:
此时你可以使用rviz2的工具栏中的Nav2 Goal发送一个目标点,然后观察机器人运动即可。 这一步经常无法实现,有什么解决的方法嘛?每次发送目标时,小车就原地转圈。
-
RE: [FishBot教程]7. FishBot-Nav2导航测试发布在 FishBot机器人
@小鱼 鱼哥在构建完地图导航测试时遇到了一点问题,问题如下:
平台:Ubuntu22.04 ROS:humble
问题:地图成功构建好后,按照教程加载到navigation2.launch.py程序中去,编译成功,然后运行后,按照问档设置起点和目标点,无法使小车导航移动。具体操作步骤和执行状态如下:
1、启动micro-ros命令:
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
状态正常,可以接收到话题
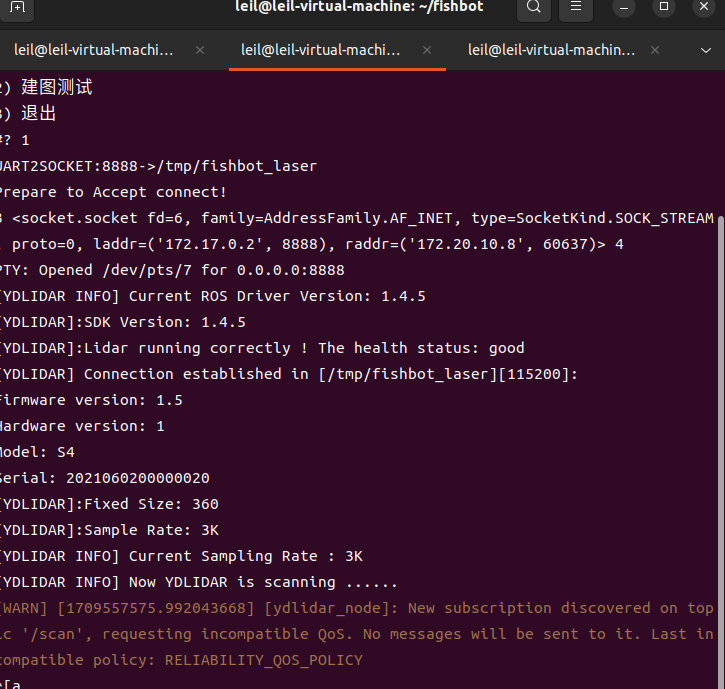
2、启动雷达驱动:
xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 fishros2/fishbot_laser
在新开的RVIZ中可以看到雷达正常工作。
3、修改navigation2.launch.py程序,加载新建的地图
4、运行程序,加载地图如下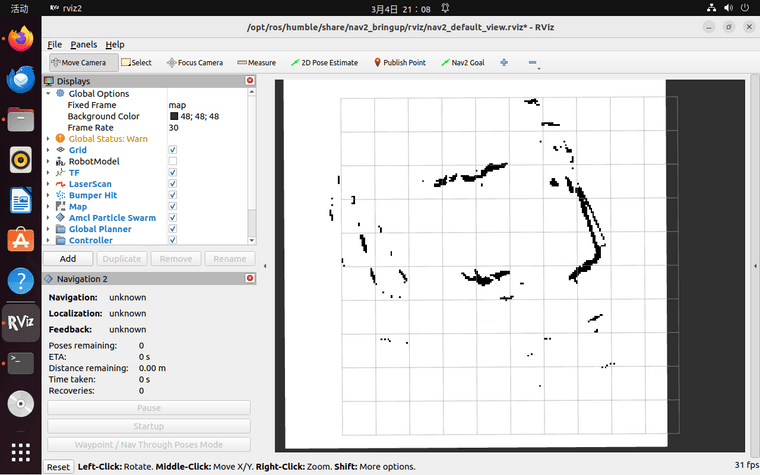

-
RE: [FishBot教程]7. FishBot-Nav2导航测试发布在 FishBot机器人
@小鱼 在 [FishBot教程]7. FishBot-Nav2导航测试 中说:
source install/setup.bash
ros2 launch fishbot_navigation2 navigation2.launch.py哥,我前面都弄好了,最后一步点击Rviz2工具栏——2D Pose Estimate没有反应是什么原因?
 ,是Ubuntu22.04,humble版本,前面的都没问题,知道一下呗,很急!!!重试了很多次都是没反应。
,是Ubuntu22.04,humble版本,前面的都没问题,知道一下呗,很急!!!重试了很多次都是没反应。 -
键盘控制Fishbot的里程信息相关问题发布在 FishBot机器人
请问一下,关于fishbot的定位里程信息,定位原点在哪,还有它的X\Y轴分别是哪个方向(相对于小车的),我经过好几次测试,都不能定位出原点的位置,而且每次得出的数据也不准确(例如,我跑完一圈回来,小车的初始位置坐标与最终位置坐标偏差很大),里程信息里的XY的单位是米嘛? 能帮我回答一下,且给出解决方案吗,球球了。
-
RE: [FishBot教程]4.使用ROS2键盘控制FishBot发布在 FishBot机器人
@小鱼 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
ros2 topic echo /odom pose.pose
如何获取准确的里程计信息呢,
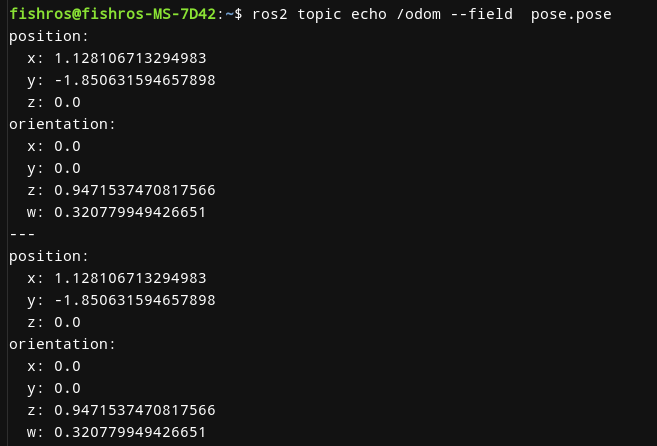 像你这样的就可以。我输入你的指令显示无效,输入ros2 topic echo /odom的话,信息太杂乱了,你有解决的方法嘛
像你这样的就可以。我输入你的指令显示无效,输入ros2 topic echo /odom的话,信息太杂乱了,你有解决的方法嘛