rtabmap运行死机,运行几帧之后就会卡死,等待一段时间后才能继续使用
-
使用设备:thinkpad-E15-Gen3、Orbbec Gemini2
系统配置:Ryzen5500U+16GB内存
系统环境:ubuntu20.04、ubuntu18.04
ROS版本:Noetic、melodic
SDK版本:Orbbec SDK V1.5.7效果如图:
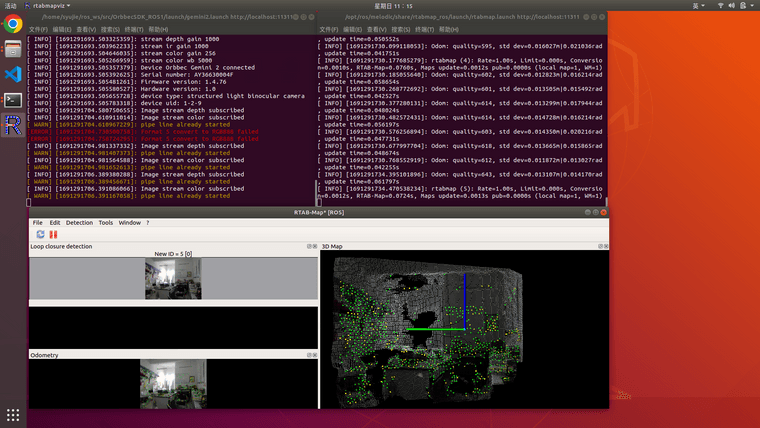
配置文件如下:
roslaunch rtabmap_ros rtabmap.launch
rtabmap_args:="–delete_db_on_start"
rgb_topic:=/camera/color/image_raw
depth_topic:=/camera/depth/image_raw
camera_info_topic:=/camera/color/camera_info
frame_id:=camera_link
approx_sync:=false个人猜测:
1、相机处报错[ERROR] [1691291704.758724295]: Format 5 convert to RGB888 failed(20.04和18.04都会报这个错),网上搜索了很多都没有这样的报错,可能是因为这个,但具体原因不详。
2、也可能是因为配置文件不对补充:是每生成两道三帧就会卡死,一段事件后继续生成,再卡死,循环往复。
-
@595344248 请问您解决了吗 我也遇到这个问题了555
-
@2723159028 您好,请问您解决了嘛,我也遇到了这个问题
-
<arg name="color_format" default="MJPG"/>更改为RGB,我的一开始也报这个错误,更改为RGB后就不报错了