ros2-humble 运行rviz时出现的错误
-
me 1403636753.514 for reason 'discarding message because the queue is full'
[rviz2-1] [INFO] [1718763485.342707357] [rviz2]: Message Filter dropping message: frame 'world' at time 1403636753.614 for reason 'discarding message because the queue is full'
[rviz2-1] [INFO] [1718763485.402471602] [rviz2]: Message Filter dropping message: frame 'world' at time 1403636753.714 for reason 'discarding message because the queue is full'
[rviz2-1] [INFO] [1718763485.402692076] [rviz2]: Message Filter dropping message: frame 'world' at time 1403636753.614 for reason 'discarding message because the queue is full'
[rviz2-1] [INFO] [1718763485.475503516] [rviz2]: Message Filter dropping message: frame 'world' at time 1403636753.714 for reason 'discarding message because the queue is full'
[rviz2-1] [INFO] [1718763485.536665646] [rviz2]: Message Filter dropping message: frame 'world' at time 1403636753.814 for reason 'discarding message because the queue is full'
[rviz2-1] [INFO] [1718763485.601782551] [rviz2]: Message Filter dropping message: frame 'world' at time 1403636753.814 for reason 'discarding message because the queue is full'
这是一个基于ros2跑一个vins-fushion。rviz就是显示不出来画面
-
出现这些错误信息通常意味着RViz2在尝试处理消息时,其内部的消息队列已满,因此无法接收更多的消息,并被迫丢弃这些消息。这可能是由于RViz2处理消息的速度跟不上发布消息的速度,或者是因为RViz2的配置参数(如消息队列大小)设置得太小。
在ROS 2中,RViz2是用于可视化传感器数据、机器人状态和其他ROS 2消息的工具。如果你使用的是
vins-fusion,那么它可能正在发布大量的传感器数据,如相机图像、IMU数据等,而RViz2可能无法及时处理这些数据。以下是一些可能的解决方案:
-
检查时间同步:确保所有节点都使用相同的时间源,并且时间同步正确。时间戳不匹配可能会导致消息被丢弃。
-
调整RViz2的更新频率:你可以尝试减少RViz2的更新频率,以减轻其处理负担。这可以通过在RViz2中调整固定帧率来实现。
-
增加消息队列大小:你可以尝试增加RViz2或相关节点的消息队列大小。这通常涉及到修改ROS 2的订阅者配置,但请注意,这可能会增加内存使用。
-
优化
vins-fusion的发布频率:如果可能的话,尝试减少vins-fusion发布消息的频率,或者只发布RViz2真正需要的消息。 -
检查网络带宽和延迟:如果你的系统是通过网络连接的,确保网络带宽足够,并且延迟较低。高延迟可能导致消息堆积。
-
查看系统资源:检查你的系统资源(如CPU和内存)是否充足。如果资源不足,可能需要升级硬件或优化软件。
-
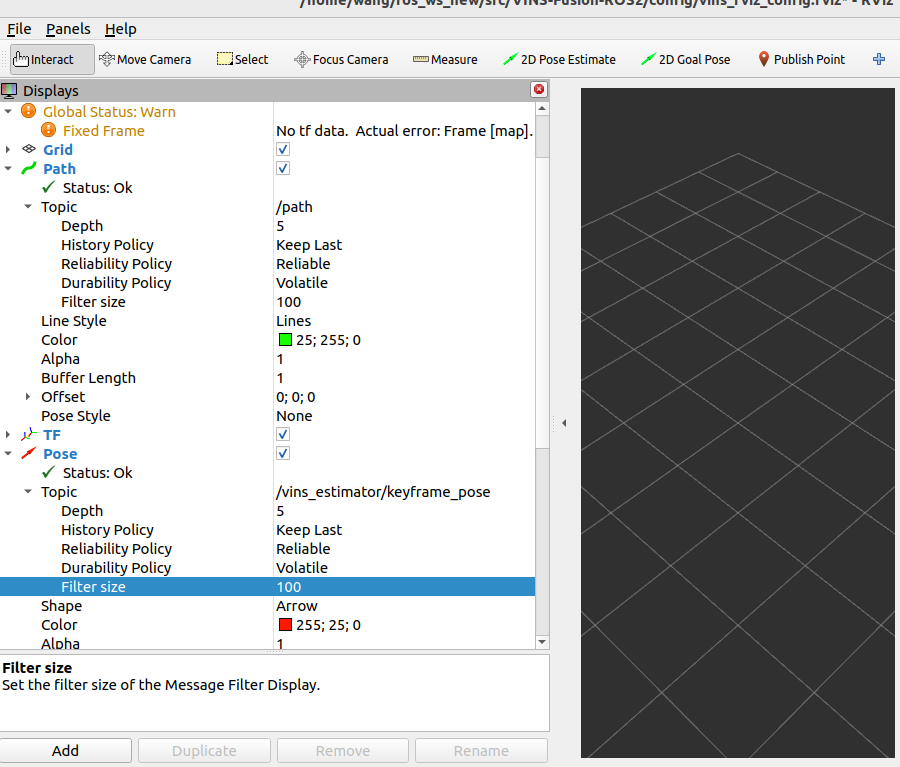
查看RViz2配置:确保RViz2正确配置了所有必要的显示项,并且它们与
vins-fusion发布的消息类型相匹配。 -
查看ROS 2日志:查看ROS 2的详细日志,可能会提供更多关于为什么消息被丢弃的线索。
最后,由于你提到的是
ros2-humble,确保你使用的RViz2版本与ROS 2 Humble版本兼容,并且所有相关依赖都已正确安装和配置。如果以上方法都不能解决问题,你可能需要更深入地调查
vins-fusion和RViz2的交互方式,或者寻求来自vins-fusion或ROS 2社区的更多帮助。
以上为生成回答,仅供参考~
-
-
@2805651606 我遇到了相同的问题,请问你解决了吗?