fishbot小车建图时偏移严重
-
fishbot小车在建图时,出现地图偏移的情况比较严重,使用的是启动雷达的命令:
xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser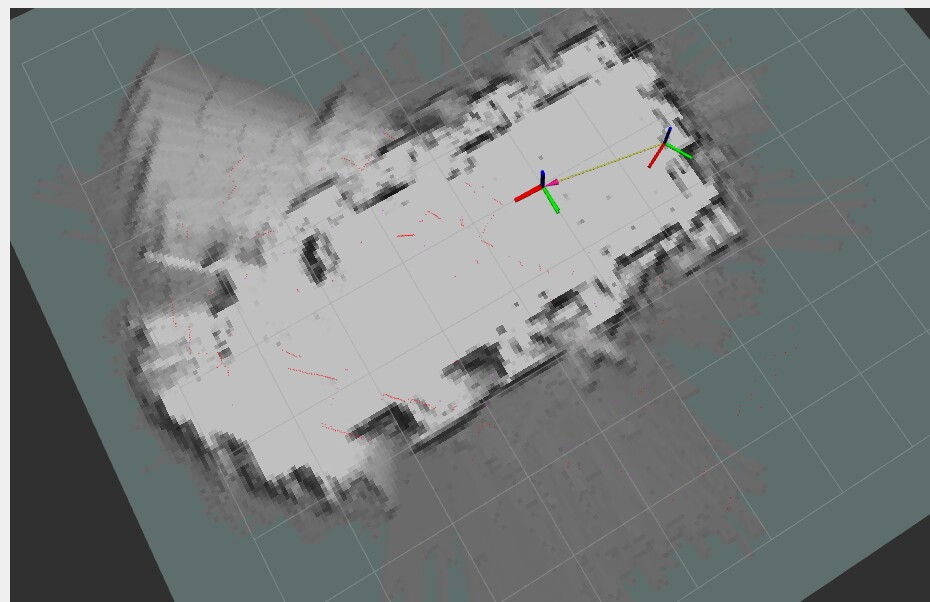
正常情况应该是这样的:
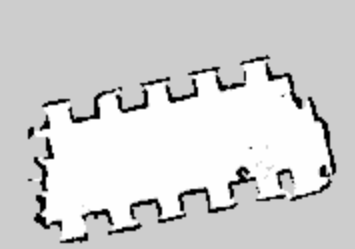
-
@414115309 速度慢一些,尤其是旋转时候的
-
Fishbot小车在建图时出现地图偏移问题,通常可能是由于多种原因导致的。为了解决这个问题,你可以按照以下步骤进行排查和调整:
-
传感器校准:
- 确保激光雷达传感器已经正确校准,并且固定稳固,没有松动。
- 检查雷达的视野是否受到遮挡或干扰,这可能会导致错误的测量数据。
-
时间同步:
- 确保雷达数据的时间戳与小车其他传感器(如里程计)的时间戳同步。
- 时间不同步可能会导致地图构建时的偏移。
-
参数调整:
- 调整SLAM(同时定位与地图构建)算法的参数,如激光雷达的扫描频率、扫描范围、最大/最小距离等。
- 检查并调整地图构建的阈值和其他相关参数。
-
环境特征:
- 地图构建的环境是否具有丰富的特征?如果环境特征不足(如大面积的平滑墙面),可能会导致定位不稳定和偏移。
-
里程计数据:
- 里程计数据的质量对地图构建至关重要。检查里程计数据是否准确,是否有噪声或漂移。
-
ROS节点状态:
- 使用
rosnode list和rostopic list检查所有相关节点的状态和数据流。 - 使用
rostopic echo来查看雷达数据和其他相关传感器的数据流。
- 使用
-
软件更新与Bug检查:
- 确保你使用的Fishbot和ROS版本是最新的,或者至少是没有已知严重Bug的版本。
- 查看Fishbot和相关SLAM算法的官方文档和社区,看看是否有其他用户遇到了类似的问题,以及他们的解决方案。
-
硬件问题:
- 如果以上软件层面的调整都不能解决问题,可能需要考虑硬件方面的问题,如激光雷达的硬件故障或性能下降。
-
实验重复:
- 在不同的环境和条件下重复实验,以排除环境因素对地图构建的影响。
-
日志分析:
- 分析ROS的日志输出,查找可能的错误或警告信息。
- 使用
rosbag record记录数据,并在后续使用rosbag play进行回放分析。
-
社区支持:
- 如果问题依然存在,可以考虑在Fishbot或ROS的社区论坛、GitHub仓库等地方寻求帮助。
请注意,地图构建是一个复杂的过程,涉及多个传感器和算法的协同工作。因此,解决偏移问题可能需要综合考虑多个因素,并进行多次尝试和调整。
以上为生成回答,仅供参考~
-
-
@414115309 对硬件的螺丝也重新加固了,还是会出现以上问题
-
@小鱼 麻烦看一下 ,多谢
-
@414115309 速度慢一些,尤其是旋转时候的
-
@小鱼我看了别人的 我查看了别人的说改了carto的代码,这个代码以前配套的小车比较小,车比原来的宽,调整了轮距后漂移比原来好多了,由于轮距不一样输出的odom信息是不准的,导致建图漂移 这个是对的吗。那如何修改代码,代码路径没找到
-
@414115309 不一样的,fishbot_laser 是纯雷达建图
-
@414115309 我的也一样,我是激光雷达加上odom建图,但漂移重叠也很严重,lz解决这个问题了吗?

-
@1039291016 请单独发帖详细说明软硬件情况,导致这个问题产生的原因太多
-
 小 小鱼 将这个主题标记为已解决,在
小 小鱼 将这个主题标记为已解决,在