快速上手第六章 建图时出现地图漂移情况
-
背景(可选):
Ubuntu 22.04实体机
网络架构:路由器用网线连接电脑(需要电脑加入路由器网络么?) fish连接路由器网络
Agent:
可以用键盘控制fish 但是fish的轮子差速有问题 右边轮在直走更快 整体偏左
主机ip:192.168.1.100
fish: 192.168.1.101问题描述:
雷达驱动报错:
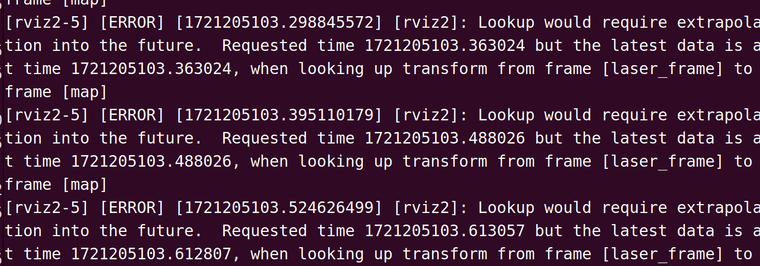
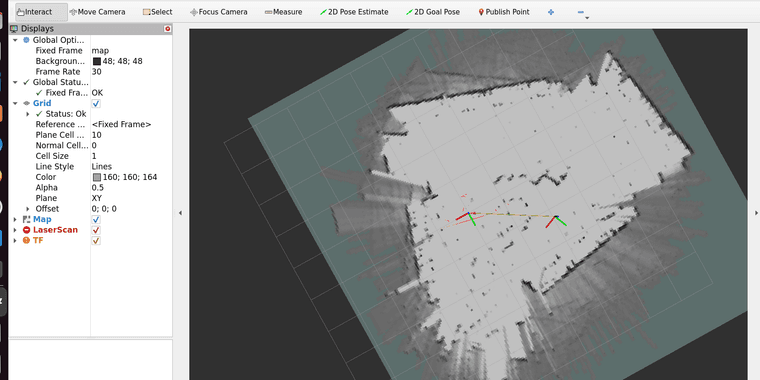
RViz上建图出现漂移
主要是想问雷达驱动的报错如何解决?卡了很久了
-
首先,关于Ubuntu 22.04实体机在建图时出现的地图漂移问题,这通常与网络架构没有直接关系,除非网络延迟或不稳定影响了传感器数据的传输。然而,从你提供的信息来看,地图漂移更可能是由于Agent(即fish)的轮子差速问题导致的。
针对你的问题,我将分两部分进行回答:
一、雷达驱动报错解决
雷达驱动报错的问题没有具体的错误信息,但一般来说,雷达驱动报错可能与以下几个方面有关:
- 驱动兼容性:确保你安装的雷达驱动与Ubuntu 22.04和雷达型号兼容。检查雷达的官方文档或支持论坛,看是否有针对Ubuntu 22.04的驱动或补丁。
- 驱动安装:确保雷达驱动已正确安装。你可以尝试重新安装或更新驱动。
- 权限问题:有时,驱动可能因权限问题而无法正常工作。确保你的用户有权访问和操作雷达设备。
- 硬件连接:检查雷达与电脑的连接是否稳定。如果是通过USB连接,尝试更换USB端口或使用其他USB线。
- 查看日志:查看系统日志或驱动日志,以获取更详细的错误信息。这有助于确定问题的根本原因。
二、地图漂移问题
地图漂移问题更可能是由于Agent(fish)的轮子差速问题导致的。以下是一些可能的解决方案:
- 校准轮子:首先,尝试校准fish的轮子,确保它们在直走时速度相同。这可能需要一些物理调整或校准过程。
- 调整控制参数:如果轮子差速是由于控制参数设置不当导致的,尝试调整这些参数。例如,你可以调整速度控制器的PID参数。
- 检查传感器数据:确保雷达和其他传感器提供的数据是准确和一致的。如果传感器数据有问题,它们可能会导致地图漂移。
- 优化建图算法:有时,建图算法可能无法很好地处理某些情况,导致地图漂移。你可以尝试使用不同的建图算法或调整算法参数。
- 硬件升级:如果以上方法都无法解决问题,考虑升级fish的硬件,特别是与轮子控制和传感器相关的部分。
最后,对于你的网络架构问题,通常电脑需要加入路由器网络以便与其他设备(如fish)进行通信。但是,这通常与地图漂移问题无关。
以上为生成回答,仅供参考~
-
@1195326523 建图过程中出现的雷达时间戳问题对吧,雷达的板的IP地址是什么,建图用的docker是吗,注意
宣传旋转速度不要太快哦 -
@小鱼 是的是时间戳问题 这个我也找到修改方案了 但是用docker拉取的话没源文件好像
雷达版ip地址是192.168.1.101 驱动板是192.168.1.102
如何调整宣传速度呢鱼哥
-
@1195326523 那你可以看看教程后面附带的其他建图方法,另外小车旋转速度可以用通过键盘(应该是z来着)调整哈(不好意思打错字了)
-
@小鱼 好的谢谢鱼哥 我去看看

-
@小鱼 对了鱼哥还有个问题就是这样的上文提到的局域网连接方式可以吗? 建图时会出现跑远再拿回来 仿真上的机器人就不回来的情况
-
@1195326523 太远了信号会很差,就无法控制了,所以在小范围内测试就好,或者笔记本跟着走
-
@小鱼 好的好的 谢谢鱼哥