用fishbot实体小车运行nav2导航时,设定目标点一直显示已到达
-
@小鱼 我之前就是用的配套建图方法,小车底盘跑的是第 16 章 移动机器人控制系统搭建 中发布里程计那儿的程序。雷达用的docker,然后用那个建图方法,经常碰到障碍物就直接完蛋了,我手动拿开也没用,怎么操作也改变不了小车的运动状态,只能按原来的速度原地打转。导致一直建不了图
-
@1281857896 这个说起来,大概率是网络问题,可以描述下你所采用的网络结构吗
-
@小鱼 校园网插路由器引出来的2.4G网络
-
@1281857896 虚拟机实体机,ping延时多少
-
@小鱼 我是双系统,没有虚拟机
-
@小鱼 我觉得像是坐标变换时间戳对不上,但是不知道具体怎么查,怎么搞
-
@1281857896 等会我运行以下,发具体报错信息
-
@1281857896
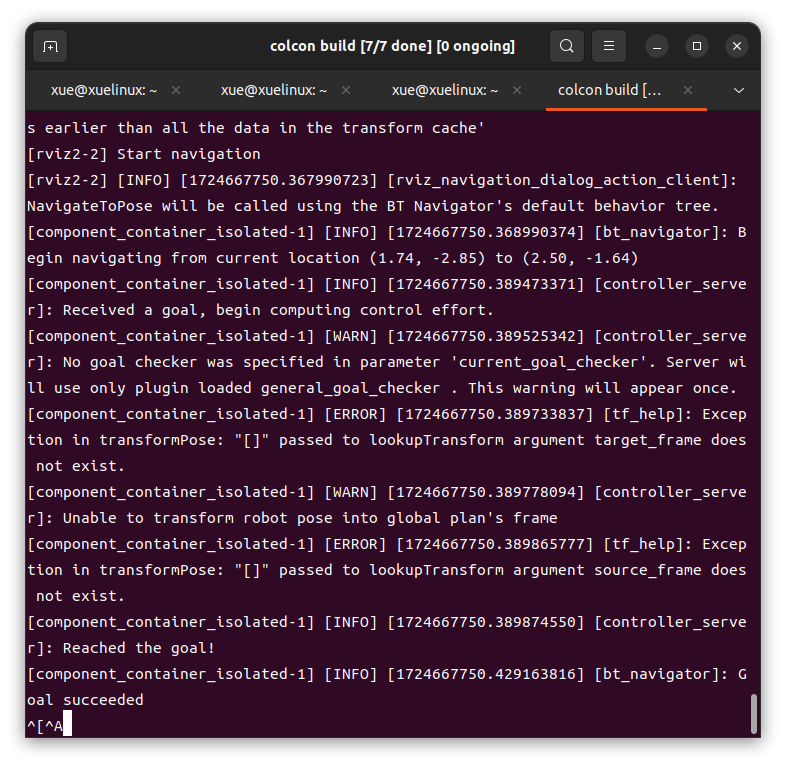 图上提示开始计算,然后说target_frame不存在
图上提示开始计算,然后说target_frame不存在 -
@1281857896
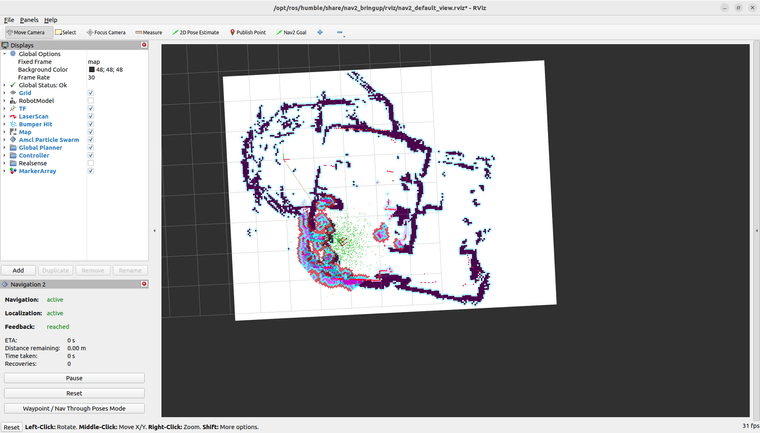 建的图长这样,因为环境问题,只能建成这种效果了,但是应该不影响到达很空旷的地方吧
建的图长这样,因为环境问题,只能建成这种效果了,但是应该不影响到达很空旷的地方吧 -
@1281857896 应该是不影响,从电脑到小车的ping延迟是多少