cartographer建图时地图漂移严重
-
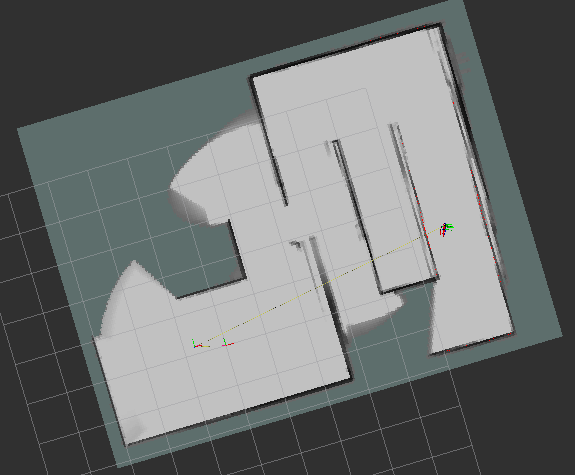
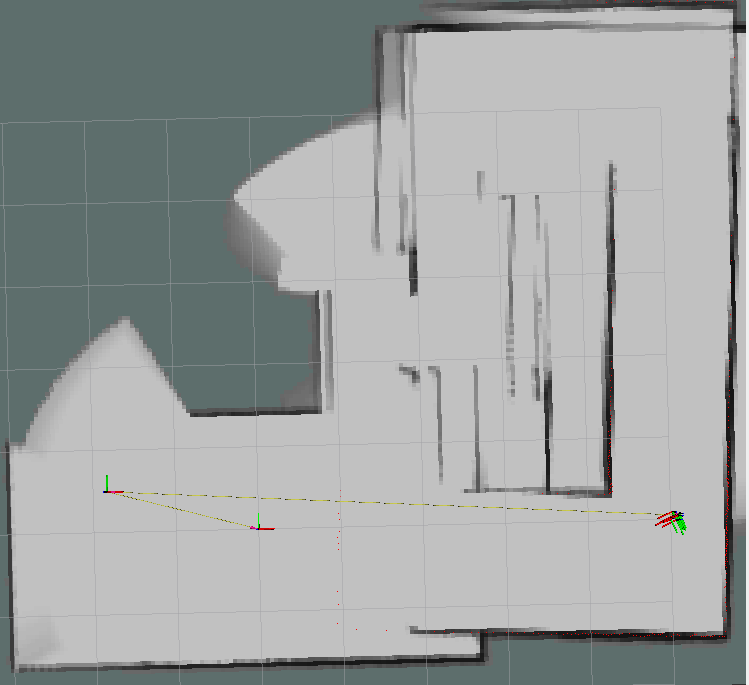
跑cartographer的时候使用了雷达scan和里程计odom,刚开始地图正常,后面漂移严重。里程计odom的tf坐标系和地图map的tf坐标系之间无法对齐,雷达的点云不停移动。后面在lds_2d.lua中不使用odom也有这样的问题。求大佬帮助
-
在使用Cartographer进行SLAM(Simultaneous Localization and Mapping)时,遇到地图漂移和坐标系不对齐的问题,通常与多种因素有关,包括传感器数据的质量、传感器之间的标定、算法参数设置等。以下是一些可能的解决步骤和检查点,希望能帮助你解决问题:
-
检查传感器数据质量:
- 确保雷达(如Lidar)的数据是清晰、无遮挡的。如果雷达数据中包含大量噪声或干扰,会影响建图的准确性。
- 检查里程计(Odometry)数据的准确性和稳定性。里程计数据如果波动大或存在偏差,也会导致地图漂移。
-
传感器标定:
- 确保雷达和里程计之间的外参(即它们之间的相对位置和姿态)是准确标定的。错误的标定会导致数据融合时出现偏差。
- 检查雷达与机器人基座的标定,确保雷达数据转换到机器人坐标系时是准确的。
-
Cartographer配置:
- 检查
lua配置文件中的参数设置。特别是与传感器噪声、运动模型相关的参数,这些参数对SLAM算法的性能有显著影响。 - 如果在关闭里程计输入后问题依旧,可能需要重新评估雷达的配置参数,如扫描匹配的最大距离、角度分辨率等。
- 检查
-
数据同步:
- 确保所有输入到Cartographer的数据(雷达扫描和里程计数据)在时间上是同步的。时间戳不匹配会导致数据融合时出现偏差。
-
查看日志和调试:
- 查看Cartographer的日志输出,检查是否有错误或警告信息。
- 使用Cartographer提供的可视化工具(如
rviz)来观察实时地图构建和传感器数据。这有助于识别问题发生的具体时刻和位置。
-
实验与对比:
- 尝试在不同的环境中运行Cartographer,看问题是否依然存在。这有助于判断问题是环境特异性的还是普遍存在的。
- 对比使用和不使用里程计时的建图效果,以评估里程计数据对建图的影响。
-
社区和文档:
- 查阅Cartographer的官方文档和社区论坛,看看是否有其他用户遇到并解决了类似的问题。
- 考虑在GitHub的Cartographer项目页面提交问题,寻求更专业的帮助。
-
硬件问题:
- 在极少数情况下,硬件故障(如传感器损坏或连接问题)也可能导致类似的问题。检查硬件连接和状态是否正常。
通过上述步骤,你应该能够定位问题的原因,并采取相应的措施来解决问题。如果问题依然存在,可能需要更深入地分析数据或寻求专业的技术支持。
以上为生成回答,仅供参考~
-