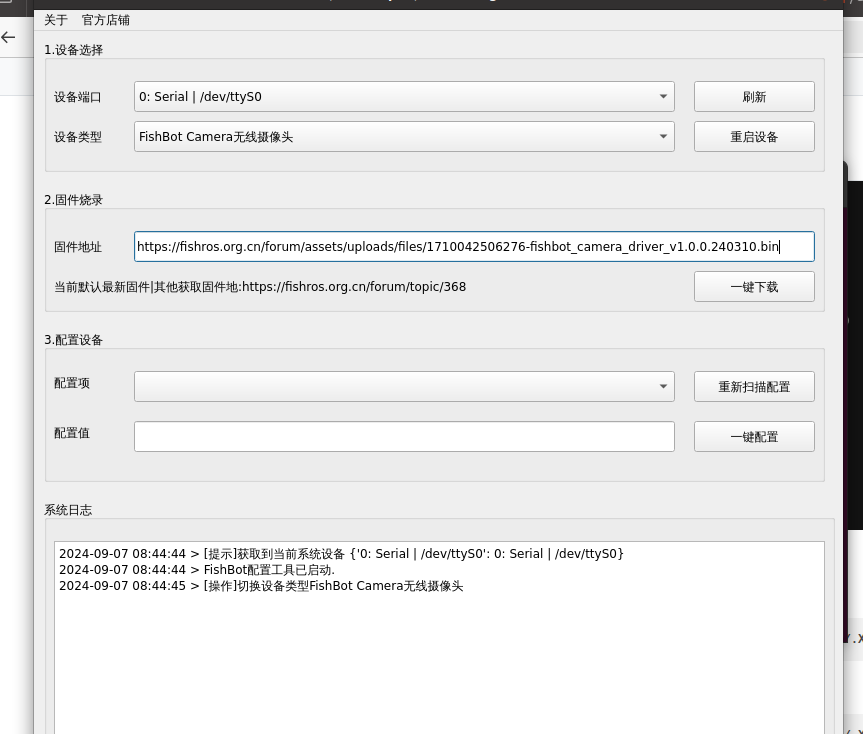
[FishBot] 9.0.2.配置助手介绍与下载
-
@小鱼
感谢小鱼不厌其烦的答疑,成功啦。 -
-
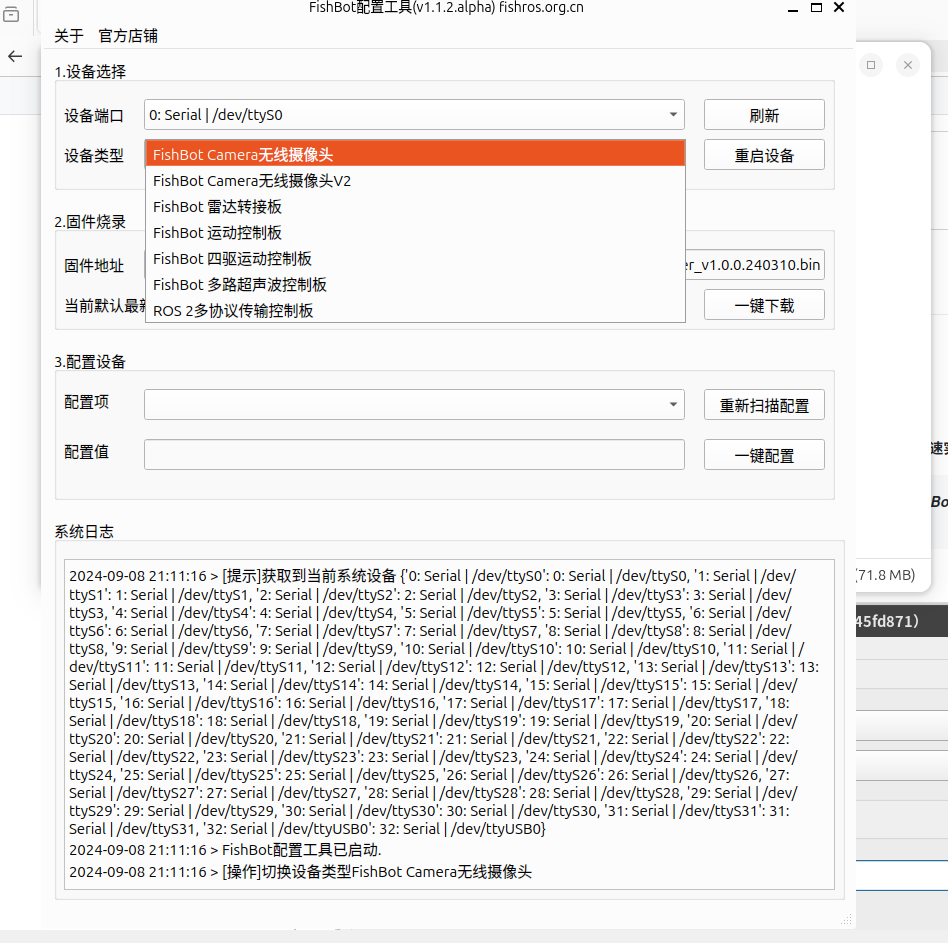 设备类型里面没有fishbot主控板,设备端口刷新也连不上。
设备类型里面没有fishbot主控板,设备端口刷新也连不上。 -
@775405893 选 /dev/ttyUSB0 另外你是不是ubuntu24.04系统,推荐ubuntu22哈
-
-
@775405893 兄台不要开玩笑,我都在你的截图中看到了,编号32的设备就是ttyUSB0
-
@775405893 另外运动控制板就是二驱主控板哈
-
@小鱼 解决了,感谢


-
香橙派是arm架构,是不是没有对应的配置助手?
-
@2826778595 需要源码用:https://github.com/fishros/fishbot_tool
或者用无界面版本的
-
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
此回复已被删除! -
请问arm64内核的ubuntu是否可以使用?
或者通过docker方式是否可行? -
@466413819 arm64只能用源码方式
-
@小鱼 我是虚拟机ubuntu arm64版本,源码方式中只有linux amd64 版本和windows版本,是不是没有办法安装配置助手?
-
@466413819 按照 README 操作:https://github.com/fishros/fishbot_tool
-
此回复已被删除! -
@果汁捏捏 docker没有安装好,重新安装下docker,或者使用其他二进制版本
