7. FishBot-Nav2导航测试-启动bringup 但bringup 无法找到
-
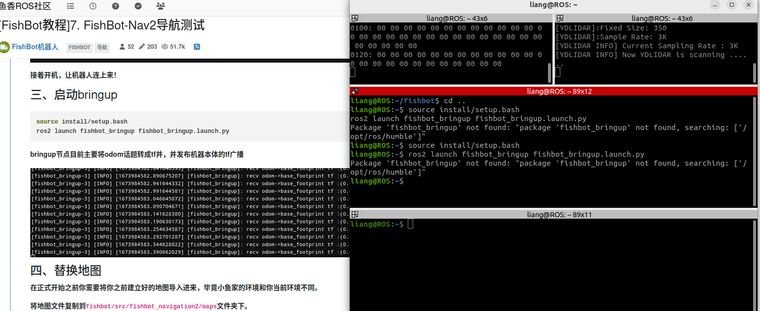
我在bringup遇到了问题。
source install/setup.bash
ros2 launch fishbot_bringup fishbot_bringup.launch.py故障如下:
Package 'fishbot_bringup' not found: "package 'fishbot_bringup' not found, searching: ['/opt/ros/humble']"有什么建议吗?感谢!
-
当你遇到
Package 'fishbot_bringup' not found的错误时,这通常意味着 ROS 2 环境没有正确识别或找不到名为fishbot_bringup的包。这个问题可能由几个原因引起,以下是一些解决步骤:-
确认包是否已安装:
首先,确保fishbot_bringup包已经被正确安装在你的 ROS 2 工作空间中。你可以检查你的工作空间目录(通常是~/dev_ws或其他你自定义的目录)下的src文件夹,看看是否包含fishbot_bringup包。 -
检查工作空间是否已构建:
如果fishbot_bringup包确实在你的工作空间中的src目录下,你需要确保已经对该工作空间进行了构建。你可以使用以下命令来构建你的工作空间:cd ~/dev_ws # 或者你的工作空间目录 colcon build --packages-select fishbot_bringup或者如果你想要构建整个工作空间:
colcon build -
重新配置环境:
每次在工作空间中进行了构建后,都需要重新配置你的环境。确保你执行了source install/setup.bash(针对 bash shell)来更新你的环境变量。 -
检查 ROS 2 环境变量:
使用echo $ROS2_PACKAGE_PATH查看 ROS 2 的包路径是否包含你的工作空间。如果没有,你需要检查你的setup.bash文件是否正确地设置了ROS2_PACKAGE_PATH。 -
检查 launch 文件路径:
确保fishbot_bringup.launch.py文件位于fishbot_bringup包的launch文件夹中。ROS 2 的launch命令会在这个位置查找.launch.py文件。 -
重新启动终端:
有时候,仅仅重新打开一个终端窗口并重新运行source install/setup.bash可以解决路径或环境变量的问题。 -
检查 ROS 2 版本和兼容性:
确保你的 ROS 2 版本(如 Humble)与fishbot_bringup包兼容。如果包是为不同版本的 ROS 2 设计的,它可能无法在你的环境中正确工作。 -
查看文档和社区:
如果以上步骤都不能解决问题,查看fishbot_bringup包的文档或相关的 ROS 2 社区和论坛可能会有帮助。
通过这些步骤,你应该能够诊断并解决
Package 'fishbot_bringup' not found的问题。如果问题仍然存在,可能需要更详细地检查包的安装和配置过程。
以上为生成回答,仅供参考~
-
-
@14324741 ROS2 基础知识 source 改变环境变量,建议去看看基础课程
-
@小鱼 已经搞定了,感谢