7. FishBot-Nav2导航测试-替换地图
-
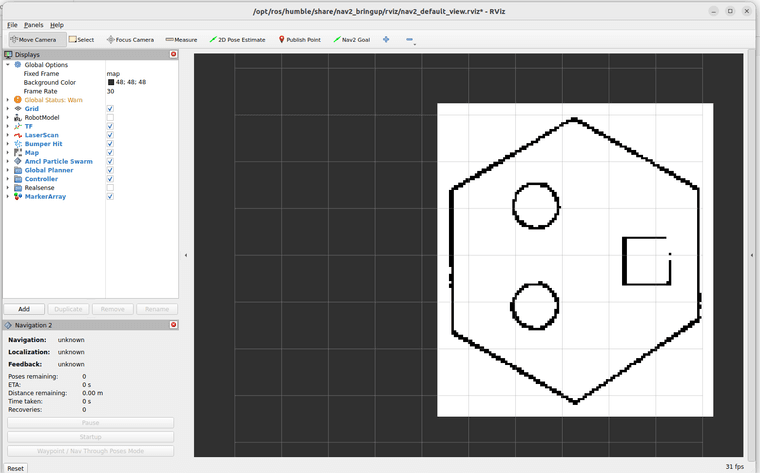
我已经按要求替换了地图的名字,但RVIZ出来的地图确是个笑脸,而不是我家的地图,为什么?
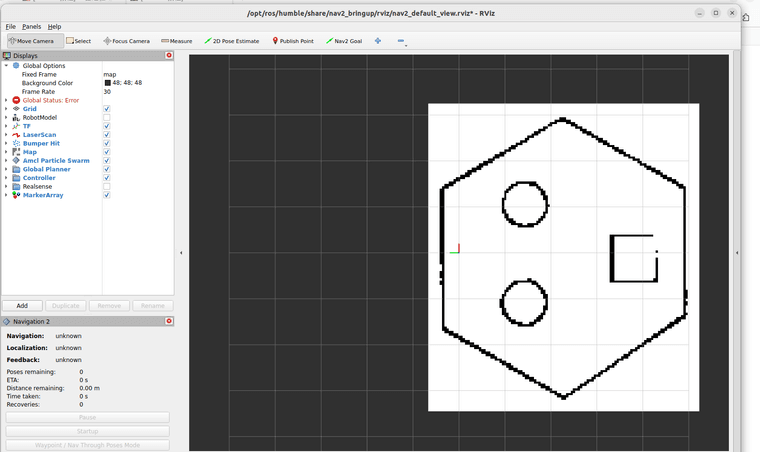
是我那里copy的不对吗?
-
在FishBot-Nav2导航测试中,如果你已经替换了地图的名字,但RVIZ中显示的却是一个笑脸而不是预期的地图,这通常是由于几个可能的原因导致的。以下是一些排查和解决问题的步骤:
1. 检查地图文件是否正确
首先,确保你替换的地图文件(如
.yaml、.pgm、.png等)是正确的,并且已经正确地放置在了FishBot的导航功能包(如fishbot_navigation2)的maps目录下。检查文件名和路径是否完全正确,没有拼写错误。2. 检查RVIZ配置
在RVIZ中,确保你加载的是正确的地图文件。RVIZ的配置文件(如
.rviz文件)中应包含指向正确地图文件的路径。检查这些路径是否已更新为你新替换的地图文件的路径。3. 检查launch文件和参数文件
在FishBot的导航配置中,通常会有多个文件涉及到地图的加载和配置,包括launch文件和参数文件(如
.yaml文件)。- Launch文件:检查启动导航系统的launch文件,确保它指向了正确的地图文件和RVIZ配置文件。
- 参数文件:检查Nav2的参数文件,确保其中关于地图的参数(如地图话题名、文件名等)已经更新为新的地图信息。
4. 清理和重新构建
有时候,旧的缓存或构建文件可能会导致问题。尝试清理你的工作空间(使用
colcon clean命令),然后重新构建(使用colcon build命令)。5. 重新启动RVIZ和导航系统
在做了上述更改后,完全关闭RVIZ和任何正在运行的导航节点,然后重新启动它们。这可以确保所有的更改都被正确加载。
6. 检查ROS2节点和话题
使用
ros2 topic list命令检查ROS2中是否有与地图相关的正确话题正在发布。同时,使用ros2 node info和ros2 topic info命令来检查节点和话题的详细信息,确认它们是否按预期工作。7. 查看日志文件
如果问题仍然存在,查看ROS2的日志文件可能会提供一些线索。这些日志文件通常可以在你的工作空间的
log目录中找到,或者通过运行ros2 bag record -a来记录并分析ROS2的消息。8. 咨询社区或专家
如果以上步骤都不能解决问题,考虑在ROS2的社区论坛、GitHub问题跟踪器或相关的技术支持渠道中寻求帮助。提供尽可能详细的信息,包括你的系统配置、更改的步骤、出现的错误消息等。
总结
替换地图后RVIZ显示笑脸而不是预期地图的问题可能由多种原因引起,包括文件路径错误、RVIZ配置错误、参数文件未更新等。通过仔细检查和按照上述步骤操作,你应该能够定位并解决问题。
以上为生成回答,仅供参考~
-
@14324741 https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答
ROS2基础知识之,重新构建才能拷贝install生效
-
@小鱼
Hello 大佬,谢谢解答,但是我不是太理解,能否麻烦详细说明一下,谢谢!问题:在FishBot-Nav2导航测试中,我将我家的地图放入fishbot/src/fishbot_navigation2/maps,并更改了navigation2.launch.py文件,之后colcon build,但是最后RVIZ显示的地图还不是我家的地图。
如下是我的操作细节:
-
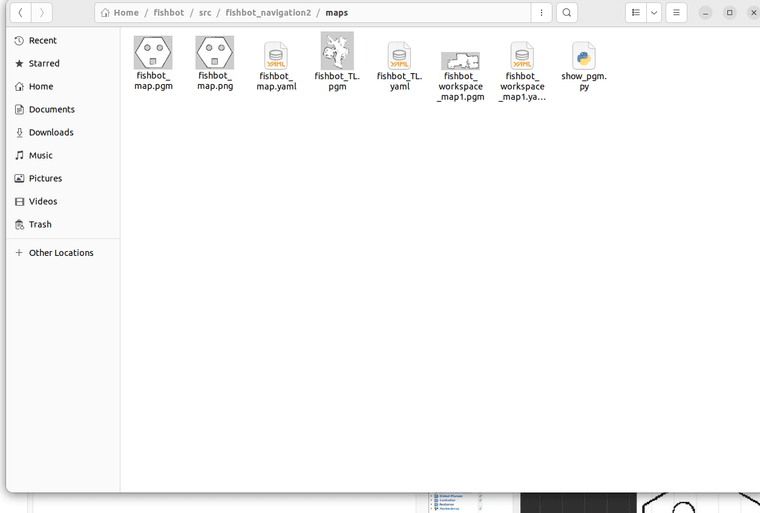
copy 我的地图到fishbot/src/fishbot_navigation2/maps,并命名fishbot_TL
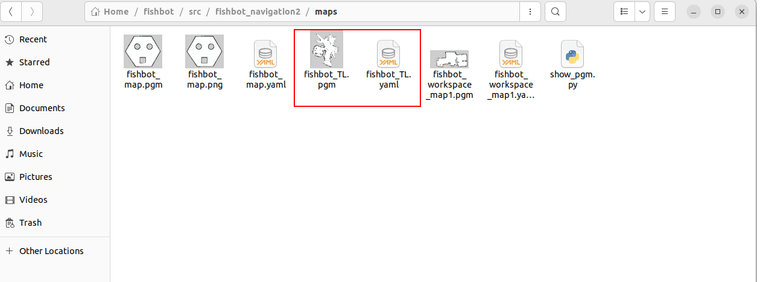
-
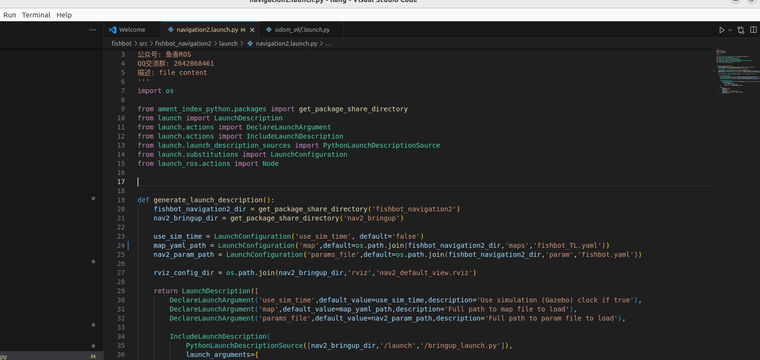
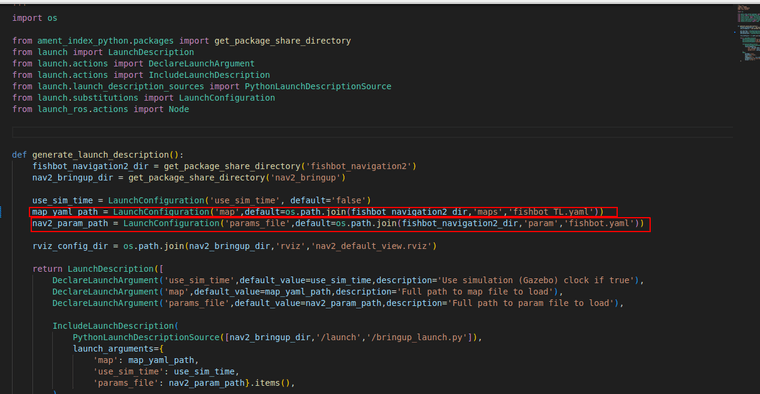
更改navigation2.launch.py文件
这里我有一个疑问,根据您的指导文档,我只更改了
map_yaml_path = LaunchConfiguration('map',default=os.path.join(fishbot_navigation2_dir,'maps','fishbot_TL.yaml'))
而没有更改
nav2_param_path = LaunchConfiguration('params_file',default=os.path.join(fishbot_navigation2_dir,'param','fishbot.yaml'))
这样对吗?
-
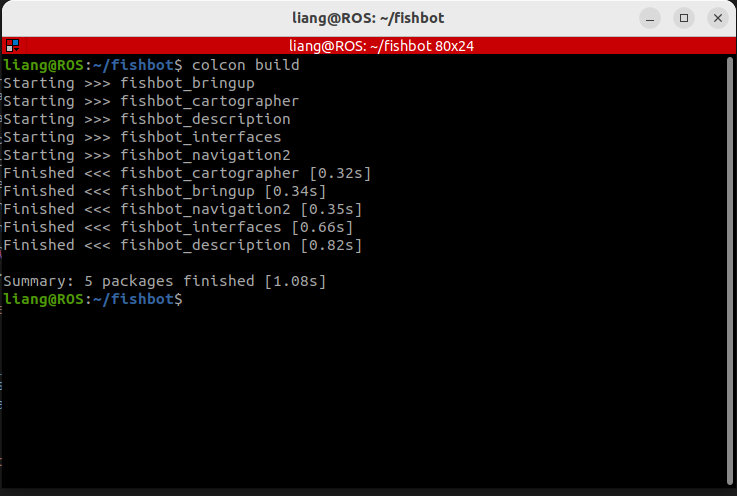
colcon build 系统显示成功
-
source install/setup.bash
ros2 launch fishbot_navigation2 navigation2.launch.py
结果显示地图还是不对
能否帮忙分析一下,我那里出了问题,感谢!
-
-
@14324741 你是什么系统哇,到install/下找到这个launch文件,确认下是否修改成功了,还不行就直接到launch目录运行 ros2 launch navigation2.launch.py
-
@小鱼 谢谢大佬回答,我将我自己的地图名字改成fishbot_map替换掉原有地图就可以了。我猜应该是某些其他地方同样需要修改名字,而我只改launch中的一个地方不行。谢谢!