鲁班猫1S使用一键安装Cartographer的时候出现apt更新失败
-
-
当你在使用鲁班猫1S或其他基于Linux的系统(如Ubuntu或Debian)进行Cartographer(一种用于移动机器人的SLAM(Simultaneous Localization and Mapping)系统)的一键安装时,如果遇到
apt更新失败的问题,这通常与软件源(repositories)的配置或网络连接有关。以下是一些解决步骤,你可以尝试来解决这个问题:-
检查网络连接:
确保你的设备已连接到互联网,并且网络连接稳定。你可以尝试ping一些网站或使用浏览器访问网页来测试网络连接。 -
更新apt源列表:
首先,尝试手动更新apt的软件包列表。打开终端并输入以下命令:sudo apt update如果这一步出现错误,注意查看错误信息,它可能会给出一些线索。
-
检查apt源配置:
如果更新失败,可能是因为软件源配置不正确或已过时。你可以查看/etc/apt/sources.list文件和/etc/apt/sources.list.d/目录下的文件,确保所有的源地址都是有效的,并且适用于你的系统架构(如armhf或amd64)。 -
更换apt源:
如果当前配置的源不可用,你可以尝试更换到其他的源。例如,如果你在使用Ubuntu,可以尝试切换到阿里云、华为云或其他可靠的源。这需要你编辑/etc/apt/sources.list文件,并替换其中的源地址。 -
清理apt缓存:
有时候,清理apt的缓存可以解决问题。使用以下命令:sudo apt clean sudo apt autoclean -
检查系统时间和时区:
错误的系统时间或时区设置有时也会导致apt更新失败。确保你的系统时间和时区设置正确。 -
使用VPN或代理:
如果你的设备位于网络受限的区域(如某些公司网络或学校网络),使用VPN或设置apt代理可能有助于解决连接问题。 -
查看具体错误信息:
apt update或apt install命令执行失败时,通常会显示错误信息。仔细阅读这些信息,它们可能会提供解决问题的直接线索。 -
手动下载并安装Cartographer:
如果通过apt安装Cartographer持续失败,你可以考虑从GitHub或其他源手动下载Cartographer的源代码,并按照其官方文档进行编译和安装。
如果上述步骤都不能解决问题,你可能需要更详细地检查你的系统配置或寻求社区的帮助。在鲁班猫1S的官方论坛或Cartographer的GitHub页面上提问时,提供详细的错误信息和你的系统配置将有助于他人更快地帮助你解决问题。
以上为生成回答,仅供参考~
-
-
Run CMD Task:[wget http://mirror.fishros.com/install/tools/tool_install_cartographer.py -O /tmp/fishinstall/tools/tool_install_cartographer.py --no-check-certificate]
[-][0.20s] CMD Result:success 80... 已连接。artographer.pyRun CMD Task:[wget http://mirror.fishros.com/install/tools/tool_config_rosdep.py -O /tmp/fishinstall/tools/tool_config_rosdep.py --no-check-certificate]
[-][0.14s] CMD Result:success 80... 已连接。sdep.py欢迎使用一键安装Cartographer,本工具由作者catalpa提供
欢迎使用一键编译安装Cartographer,该工具将会以当前目录作为工作区,创建src文件夹并进行cartographer的编译安装
使用一键安装前,若未安装ROS或出现错误,可以使用一键安装ROS
检测到您的系统版ROS版本为:noetic
Run CMD Task:[sudo apt update]
[-][29.49s] CMD Result:code:100 y/multiverse arm64 Packages495 kB]]apt更新失败,后续程序可能会继续尝试...,[]
欢迎加入机器人学习交流QQ群:438144612(入群口令:一键安装)
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或打开链接查看:https://item.taobao.com/item.htm?id=696573635888
如在使用过程中遇到问题,请打开:https://fishros.org.cn/forum 进行反馈检测到本次运行出现失败命令,直接退出按Ctrl+C,按任意键上传日志并退出
^C -
换了热点还是报错
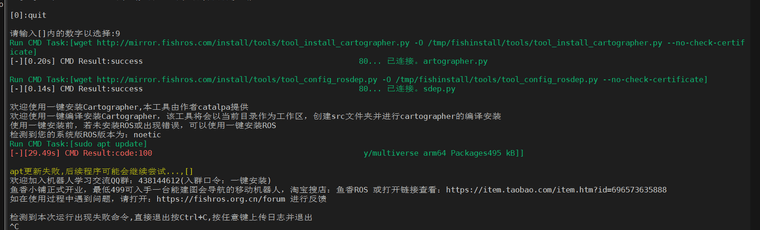
请输入[]内的数字以选择:9
Run CMD Task:[wget http://mirror.fishros.com/install/tools/tool_install_cartographer.py -O /tmp/fishinstall/tools/tool_install_cartographer.py --no-check-certificate]
[-][0.26s] CMD Result:success 80... 已连接。artographer.pyRun CMD Task:[wget http://mirror.fishros.com/install/tools/tool_config_rosdep.py -O /tmp/fishinstall/tools/tool_config_rosdep.py --no-check-certificate]
[-][0.25s] CMD Result:success 80... 已连接。sdep.py欢迎使用一键安装Cartographer,本工具由作者catalpa提供
欢迎使用一键编译安装Cartographer,该工具将会以当前目录作为工作区,创建src文件夹并进行cartographer的编译安装
使用一键安装前,若未安装ROS或出现错误,可以使用一键安装ROS
检测到您的系统版ROS版本为:noetic
Run CMD Task:[sudo apt update]
[-][191.87s] CMD Result:code:100 y/multiverse arm64 Packagescons [2,497 B]]]apt更新失败,后续程序可能会继续尝试...,[]
欢迎加入机器人学习交流QQ群:438144612(入群口令:一键安装)
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或打开链接查看:https://item.taobao.com/item.htm?id=696573635888
如在使用过程中遇到问题,请打开:https://fishros.org.cn/forum 进行反馈检测到本次运行出现失败命令,直接退出按Ctrl+C,按任意键上传日志并退出