ROS turtlebot3 gazebo角速度跳变
-
我在Ubuntu 20.04的noetic ros1,Gazebo 11.14上运行Gazebo Turtlebot3的仿真,但是机器人的角速度经常发生跳变。
比如用下面这段代码:#include "ros/ros.h" #include <Eigen/Core> #include <Eigen/Dense> #include <iostream> #include "nav_msgs/Path.h" #include "nav_msgs/Odometry.h" #include <tf2_ros/buffer.h> #include <tf2/LinearMath/Matrix3x3.h> #include "tf2_ros/transform_listener.h" #include "tf2_geometry_msgs/tf2_geometry_msgs.h" #include "narrow_space_navigation/point_style.h" #include "narrow_space_navigation/utils.h" #include <random> Controller::car_state cur_pose; void odom_callback(const nav_msgs::Odometry::ConstPtr &msg) { try { geometry_msgs::Quaternion odom_quat = msg->pose.pose.orientation; tf2::Quaternion quat; tf2::fromMsg(odom_quat, quat); double roll, pitch, yaw; tf2::Matrix3x3(quat).getRPY(roll, pitch, yaw); cur_pose.x = msg->pose.pose.position.x; cur_pose.y = msg->pose.pose.position.y; cur_pose.yaw = yaw; cur_pose.v = msg->twist.twist.linear.x; cur_pose.w = msg->twist.twist.angular.z; } catch(const std::exception& e) { ROS_INFO("Some errors in the odom_callback."); } } int main(int argc, char *argv[]) { ros::init(argc,argv,"ramdom_test"); FILE* new_log; new_log = fopen("new_test.txt", "w"); ROS_INFO("ros init"); ros::NodeHandle nh; ros::Publisher twist_pub = nh.advertise<geometry_msgs::Twist>("/cmd_vel", 10); ros::Subscriber odom_sub = nh.subscribe("/odom", 10, odom_callback); int multiplier = atoi(argv[1]); geometry_msgs::Twist control_output; double dt = 0.02; double a = 0.0; ros::Rate r(50); while (ros::ok()) { a = a + dt; control_output.linear.x = 0.25 * (1 - cos(a)) * multiplier; double w_acc = 0.25 * sin(a) * multiplier; control_output.angular.z = control_output.angular.z + w_acc * dt; r.sleep(); ros::spinOnce(); twist_pub.publish(control_output); fprintf(new_log, "%.6f " "%.6f %.6f %.6f %.6f %.6f %.6f %.6f\n", cur_pose.x, cur_pose.y, cur_pose.yaw, control_output.linear.x, control_output.angular.z, cur_pose.v, cur_pose.w, w_acc); fflush(new_log); } return 0; }用默认的waffle_pi进行测试,得到的图像是这样,这是因为摩擦力太小了:
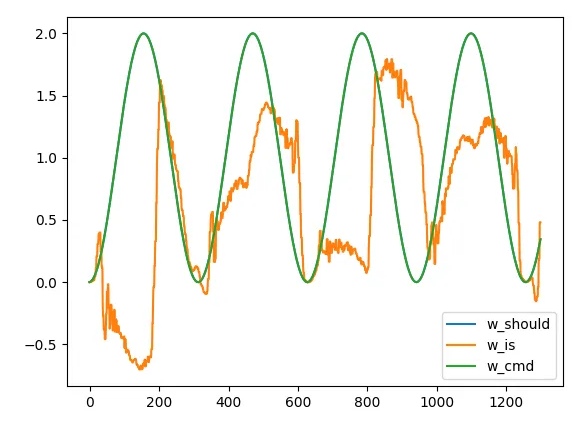
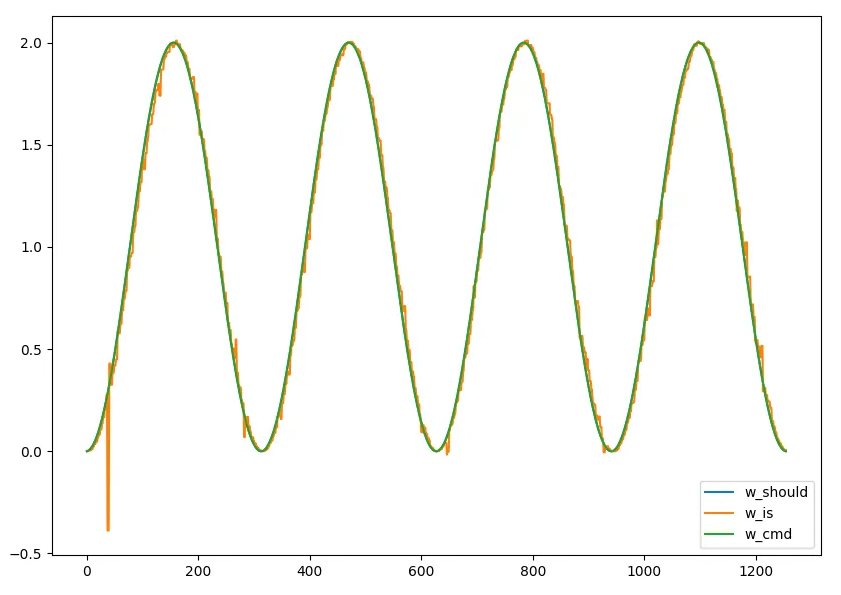
于是我修改了机器人的URDF文件:<?xml version="1.0"?> <robot name="turtlebot3_waffle_pi_sim" xmlns:xacro="http://ros.org/wiki/xacro"> <xacro:arg name="laser_visual" default="false"/> <xacro:arg name="camera_visual" default="false"/> <xacro:arg name="imu_visual" default="false"/> <gazebo reference="base_link"> <material>Gazebo/DarkGrey</material> </gazebo> <gazebo reference="wheel_left_link"> <mu1>1.0</mu1> <mu2>1.0</mu2> <soft_cfm>0.0</soft_cfm> <soft_erp>0.2</soft_erp> <kp>1e15</kp> <kd>4e12</kd> <minDepth>0.001</minDepth> <maxVel>10</maxVel> <fdir1>1 0 0</fdir1> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="wheel_right_link"> <mu1>1.0</mu1> <mu2>1.0</mu2> <soft_cfm>0.0</soft_cfm> <soft_erp>0.2</soft_erp> <kp>1e15</kp> <kd>4e12</kd> <minDepth>0.001</minDepth> <maxVel>10</maxVel> <fdir1>1 0 0</fdir1> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="caster_back_right_link"> <mu1>0.01</mu1> <mu2>0.01</mu2> <soft_cfm>0.0</soft_cfm> <soft_erp>0.2</soft_erp> <kp>1e15</kp> <kd>4e12</kd> <minDepth>0.001</minDepth> <maxVel>10</maxVel> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="caster_back_left_link"> <mu1>0.01</mu1> <mu2>0.01</mu2> <soft_cfm>0.0</soft_cfm> <soft_erp>0.2</soft_erp> <kp>1e15</kp> <kd>4e12</kd> <minDepth>0.001</minDepth> <maxVel>10</maxVel> <material>Gazebo/FlatBlack</material> </gazebo> <gazebo reference="imu_link"> <sensor type="imu" name="imu"> <always_on>true</always_on> <visualize>$(arg imu_visual)</visualize> </sensor> <material>Gazebo/Grey</material> </gazebo> <gazebo> <plugin name="turtlebot3_waffle_pi_controller" filename="libgazebo_ros_diff_drive.so"> <commandTopic>cmd_vel</commandTopic> <odometryTopic>odom</odometryTopic> <odometryFrame>odom</odometryFrame> <odometrySource>world</odometrySource> <publishOdomTF>true</publishOdomTF> <robotBaseFrame>base_footprint</robotBaseFrame> <publishWheelTF>false</publishWheelTF> <publishTf>true</publishTf> <publishWheelJointState>true</publishWheelJointState> <legacyMode>false</legacyMode> <updateRate>100</updateRate> <leftJoint>wheel_left_joint</leftJoint> <rightJoint>wheel_right_joint</rightJoint> <wheelSeparation>0.287</wheelSeparation> <wheelDiameter>0.066</wheelDiameter> <wheelAcceleration>4</wheelAcceleration> <wheelTorque>10</wheelTorque> <rosDebugLevel>na</rosDebugLevel> </plugin> </gazebo> <gazebo> <plugin name="imu_plugin" filename="libgazebo_ros_imu.so"> <alwaysOn>true</alwaysOn> <bodyName>imu_link</bodyName> <frameName>imu_link</frameName> <topicName>imu</topicName> <serviceName>imu_service</serviceName> <gaussianNoise>0.0</gaussianNoise> <updateRate>0</updateRate> <imu> <noise> <type>gaussian</type> <rate> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </rate> <accel> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </accel> </noise> </imu> </plugin> </gazebo> <gazebo reference="base_scan"> <material>Gazebo/FlatBlack</material> <sensor type="ray" name="lds_lfcd_sensor"> <pose>0 0 0 0 0 0</pose> <visualize>$(arg laser_visual)</visualize> <update_rate>5</update_rate> <ray> <scan> <horizontal> <samples>360</samples> <resolution>1</resolution> <min_angle>0.0</min_angle> <max_angle>6.28319</max_angle> </horizontal> </scan> <range> <min>0.120</min> <max>3.5</max> <resolution>0.015</resolution> </range> <noise> <type>gaussian</type> <mean>0.0</mean> <stddev>0.01</stddev> </noise> </ray> <plugin name="gazebo_ros_lds_lfcd_controller" filename="libgazebo_ros_laser.so"> <topicName>scan</topicName> <frameName>base_scan</frameName> </plugin> </sensor> </gazebo> <!--link : https://www.raspberrypi.org/documentation/hardware/camera/--> <gazebo reference="camera_rgb_frame"> <sensor type="camera" name="Pi Camera"> <always_on>true</always_on> <visualize>$(arg camera_visual)</visualize> <camera> <horizontal_fov>1.085595</horizontal_fov> <image> <width>640</width> <height>480</height> <format>R8G8B8</format> </image> <clip> <near>0.03</near> <far>100</far> </clip> </camera> <plugin name="camera_controller" filename="libgazebo_ros_camera.so"> <alwaysOn>true</alwaysOn> <updateRate>30.0</updateRate> <cameraName>camera</cameraName> <frameName>camera_rgb_optical_frame</frameName> <imageTopicName>rgb/image_raw</imageTopicName> <cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName> <hackBaseline>0.07</hackBaseline> <distortionK1>0.0</distortionK1> <distortionK2>0.0</distortionK2> <distortionK3>0.0</distortionK3> <distortionT1>0.0</distortionT1> <distortionT2>0.0</distortionT2> </plugin> </sensor> </gazebo> </robot>此时图像为:
似乎好了不少,但是在图像开始区域出现了大的跳变。我以为是角速度和角加速度太大了,因此平滑一下(此处不是上面代码执行的,而是另一个MPC程序):
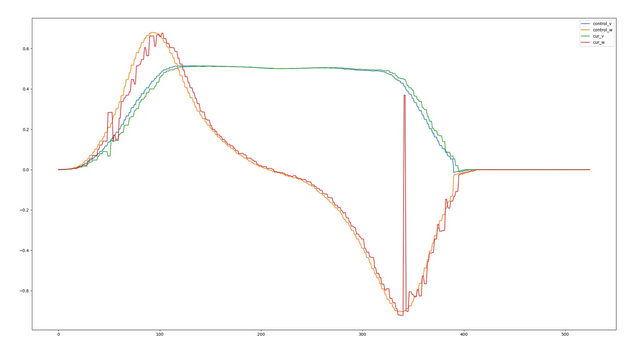
我的控制输入似乎足够平滑了,但机器人能会出现非常离谱的跳变。后面我进一步减少角速度控制的角加速度,但让然会有非常大的跳变出现,我想知道这是为什么呢?
如果这是模型问题,那我该怎么调整参数?如果是控制问题,是发生在哪里?
最后,如果是Turtlebot3这个模型不支持这么大的角加速度(即便我已经调的很小了,0.5m/s^2),那我应该自己写一个吗,还是在找一个开源的模型。 -
针对您在使用Turtlebot3在Gazebo中进行仿真时遇到的角速度跳变问题,我们可以从几个方面来分析和解决:
1. 仿真模型参数调整
首先,您已经对轮子的摩擦系数和物理属性进行了调整,这是一个很好的开始。然而,可能还需要进一步检查以下参数:
- wheelTorque 和 wheelAcceleration:这些参数直接影响轮子的响应速度和力量。如果设置得过高,可能会导致模型在物理仿真中表现不稳定。尝试逐步降低这些值,看看是否有助于减少跳变。
- 仿真步长(Simulation Step Size):Gazebo中的仿真步长(或称为时间步长)也可能影响仿真的稳定性。虽然您已经在代码中设置了较高的控制更新率(50Hz),但Gazebo的物理引擎可能以不同的步长运行。可以在Gazebo的设置中调整这个参数。
2. 控制算法
从您提供的代码来看,您似乎正在使用一个基于时间积分的控制算法来调整角速度。这种方法在理想条件下可能工作得很好,但在物理仿真中,由于存在各种不确定性和噪声,可能会导致不稳定的行为。
- 平滑控制输入:除了调整角加速度的增量外,还可以考虑使用更平滑的控制算法,如PID控制器或更高级的控制策略,如模型预测控制(MPC)。
- 限制控制输入:确保控制输入(即线性速度和角速度)在合理的物理范围内。例如,可以设置一个最大角速度限制。
3. 仿真环境
- 地面条件:地面的摩擦系数和不平整度也会影响仿真结果。确保地面属性(如摩擦系数)与实际情况相符。
- 其他物体:检查仿真环境中是否有其他可能影响Turtlebot3运动的物体,如墙壁、障碍物等。
4. 代码实现
- 异常处理:在
odom_callback中,您已经尝试捕获并处理异常,但确保这些异常处理逻辑是完整且有效的。 - 数据同步:确保在发布控制命令和读取里程计数据之间没有显著的时间延迟。
5. 替换模型
如果调整以上参数和算法后问题仍未解决,可能需要考虑使用其他仿真模型。Turtlebot3的模型在大多数情况下应该足够稳定,但如果您的应用场景非常特殊或需要更高的精度,可能需要自定义模型。
结论
建议先从调整仿真参数和控制算法开始,因为这些通常是解决此类问题的最直接和有效的方法。如果这些方法都不能解决问题,再考虑替换模型或进一步深入分析物理仿真引擎的行为。在开发过程中,保持对控制输入和仿真输出的仔细监控,以便及时发现问题并进行调整。
以上为生成回答,仅供参考~
-
-
没有朋友知道发生的原因吗?