请问调用gazebo一直报错是什么原因,求解
-
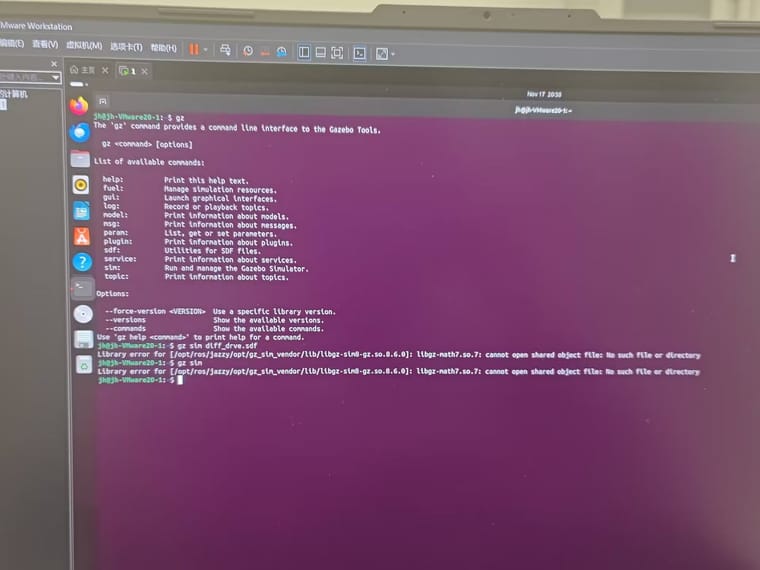 请问gazebo已经安装了,但是调用失败了,是什么原因,求各位解惑
请问gazebo已经安装了,但是调用失败了,是什么原因,求各位解惑 -
Gazebo调用失败可能由多种原因引起,以下是一些常见的可能原因及其解决方案:
一、网络问题
Gazebo在启动时会自动从网络下载模型库,但由于网络问题或模型库本身的问题,加载过程可能会失败,导致Gazebo无法正常启动。
-
解决方案:
- 手动下载模型库:访问Gazebo官方GitHub仓库(https://github.com/osrf/gazebo_models),手动下载所需的模型库,并将其放到Gazebo软件相应的文件夹下(通常为
~/.gazebo/models)。 - 禁用自动下载:修改Gazebo的配置文件,禁用自动下载模型库的功能,这样Gazebo在启动时就不会尝试从网络加载模型库。
- 检查网络连接:确保计算机已连接到稳定的网络,并可以正常访问外部网络。
- 配置防火墙:检查防火墙设置,确保Gazebo可以正常访问外部网络。如有必要,可以临时关闭防火墙以测试Gazebo是否可以正常启动。
- 使用代理:如果需要通过代理服务器访问外部网络,确保代理设置正确,并配置Gazebo使用代理服务器。
- 手动下载模型库:访问Gazebo官方GitHub仓库(https://github.com/osrf/gazebo_models),手动下载所需的模型库,并将其放到Gazebo软件相应的文件夹下(通常为
二、系统配置问题
系统配置问题也可能导致Gazebo启动失败,例如环境变量设置不正确、依赖包缺失等。
-
解决方案:
- 检查环境变量:确保Gazebo相关的环境变量设置正确,例如
GAZEBO_MODEL_PATH等。 - 安装依赖包:确保已安装Gazebo所需的依赖包,如OpenCV、SDL等。可以使用包管理器(如
apt-get、yum等)来安装这些依赖包。 - 更新系统:确保操作系统和相关软件已更新到最新版本,以修复可能存在的系统漏洞和兼容性问题。
- 检查环境变量:确保Gazebo相关的环境变量设置正确,例如
三、安装问题
安装包下载慢或失败,安装过程中报错,也可能导致Gazebo无法正常使用。
-
解决方案:
- 更换下载源:尝试更换下载源,选择国内镜像站点进行下载,可大幅提高下载速度。
- 检查系统环境:确保系统环境满足Gazebo的安装要求,如操作系统版本、依赖库等。
- 搜索解决方案:根据报错信息在官方文档或社区论坛中搜索解决方案,通常能找到针对性的解答。
四、模型导入与仿真调试问题
模型格式不支持、模型导入后位置或姿态不正确、仿真速度慢、仿真结果与实际不符等,也可能影响Gazebo的正常使用。
-
解决方案:
- 转换模型格式:使用第三方转换工具将不支持的格式转换为Gazebo支持的格式,或在官方模型库中寻找相似的模型进行替换。
- 调整模型位置与姿态:在导入模型前,确保模型的坐标系与Gazebo中的坐标系一致。如有必要,可在导入后对模型的位置和姿态进行调整。
- 设置模型属性:根据实际情况对模型的属性进行设置,如质量、惯性、关节类型等。
- 优化模型复杂度:减少不必要的细节和约束,以提高仿真速度。
- 调整仿真参数:根据硬件配置调整仿真参数,如时间步长、仿真精度等。
- 检查模型设置:确保模型设置正确,包括属性设置、约束条件等。
- 查看错误日志:遇到仿真错误或崩溃时,首先查看错误日志,了解具体的错误原因,并根据错误提示进行排查和修复。
五、ROS与Gazebo集成问题
如果在ROS环境中使用Gazebo,可能会遇到与ROS集成相关的问题,如服务不可用、进程崩溃等。
-
解决方案:
- 确保Gazebo加载了ROS相关库:在启动Gazebo时,确保加载了
gazebo_ros_factory等相关库。 - 检查ROS节点和服务:确保ROS节点和服务正常运行,没有命名冲突或通信问题。
- 杀掉并重新启动进程:如果
gzclient和gzserver进程无法正常停掉释放资源,可能会影响Gazebo的正常启动与工作。此时可以尝试杀掉这些进程并重新执行。
- 确保Gazebo加载了ROS相关库:在启动Gazebo时,确保加载了
综上所述,Gazebo调用失败可能涉及多个方面的问题,需要根据具体情况进行排查和解决。如果以上方法均无法解决问题,建议查阅Gazebo的官方文档或在相关社区论坛中寻求帮助。
以上为生成回答,仅供参考~
-