Ubuntu 编译micro-ROS for Arduino失败
-
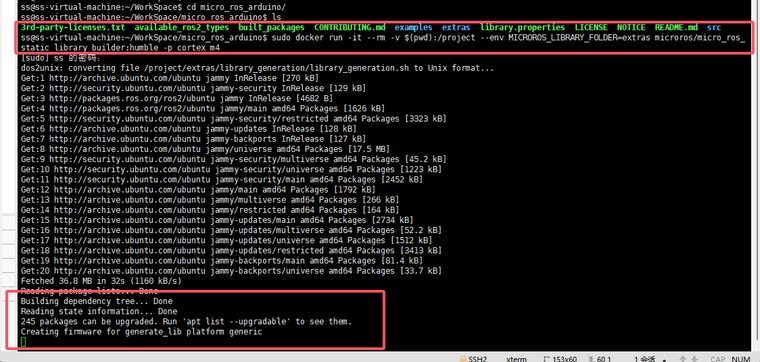
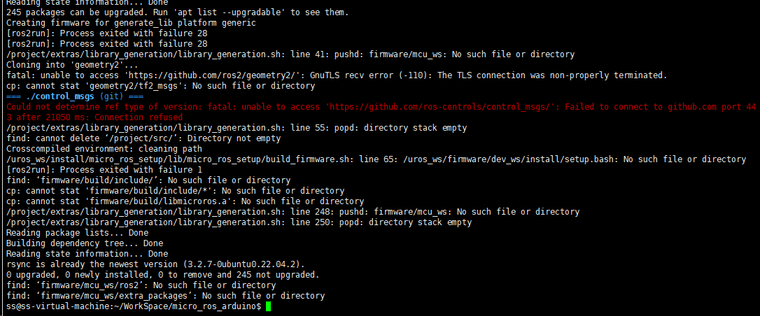
老是出现一些奇奇怪怪的问题导致编译失败,大部分感觉是因为网络原因,有没有大佬尝试编译过。 -
 救命
救命 -
在Ubuntu上编译micro-ROS for Arduino时,确实可能会遇到一些挑战,特别是由于网络问题或配置不当导致的编译失败。以下是一些建议和解决方案,希望能帮助您解决编译过程中遇到的问题:
一、检查网络连接
由于micro-ROS的编译过程可能需要从远程仓库下载依赖项,因此稳定的网络连接至关重要。您可以尝试以下方法来确保网络连接正常:
- 确保您的Ubuntu系统已连接到互联网,并且网络连接稳定。
- 如果您处于网络受限的环境(如公司网络、学校网络等),请检查是否有防火墙或代理设置阻止了编译过程中的网络访问。
二、更新和安装必要的依赖项
在编译micro-ROS之前,确保您的Ubuntu系统上已安装了所有必要的依赖项。这包括CMake、GCC等编译工具链,以及Arduino IDE和相关开发板支持包。您可以通过以下命令来更新系统并安装这些依赖项:
sudo apt-get update sudo apt-get install build-essential cmake gcc g++ arduino-core注意:
arduino-core是一个占位符,您可能需要根据具体的Arduino开发板型号安装相应的支持包。三、下载和配置micro-ROS
-
下载micro-ROS的预编译库:
- 访问micro-ROS Arduino的GitHub仓库。
- 在“Releases”部分下载最新的预编译库。
-
安装Arduino IDE:
- 从Arduino官方网站下载并安装最新版本的Arduino IDE。
- 在Arduino IDE中,选择“Sketch”->“Include Library”->“Add .ZIP Library”,然后导入下载的micro-ROS预编译库。
-
配置Arduino IDE:
- 根据您的Arduino开发板型号,在Arduino IDE中选择正确的开发板和端口。
- 确保Arduino IDE的版本符合micro-ROS项目的要求(通常建议使用最新版本)。
四、编译和上传代码
-
选择示例代码:
- 在Arduino IDE中,打开“File”->“Examples”->“micro-ROS”文件夹,选择一个示例代码进行编译和上传。
-
编译代码:
- 在Arduino IDE中点击“编译”按钮,开始编译代码。如果编译过程中出现错误,请仔细检查错误信息,并根据提示进行修复。
-
上传代码:
- 编译成功后,点击“上传”按钮将代码上传到Arduino开发板。
五、解决常见编译错误
-
依赖项未找到:
- 如果编译过程中提示缺少某些依赖项,请确保您已正确安装了这些依赖项,并且Arduino IDE已正确配置了这些依赖项的路径。
-
网络问题导致的编译失败:
- 如果编译过程中因为网络问题导致下载依赖项失败,请检查您的网络连接,并尝试重新编译。如果问题依旧存在,您可以考虑使用代理或VPN来访问远程仓库。
-
版本不匹配问题:
- 确保您使用的Arduino IDE版本、micro-ROS版本以及开发板支持包版本之间兼容。如果版本不匹配,可能会导致编译失败。
六、参考官方文档和社区支持
- 访问micro-ROS官方文档以获取更多关于micro-ROS for Arduino的详细信息和示例代码。
- 在Arduino社区、GitHub仓库或相关论坛中寻求帮助,与其他开发者交流经验和解决方案。
总之,编译micro-ROS for Arduino需要一定的耐心和细心。通过检查网络连接、更新和安装必要的依赖项、正确配置Arduino IDE以及解决常见的编译错误,您应该能够成功编译并上传micro-ROS代码到Arduino开发板上。如果问题依旧存在,请考虑寻求官方文档或社区支持的帮助。
以上为生成回答,仅供参考~
-