有可执行文件,配置好环境无法rosrun找到
-
标题:
有可执行文件,配置好环境无法rosrun找到
背景:
学习ros基础操作时发现
问题描述:
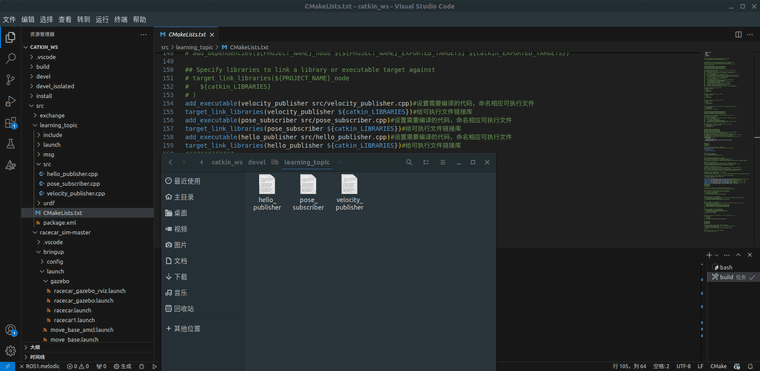
在ros中,配置好了环境变量,在~/gongzuomul/devel/lib下也有可执行文件,但是rosrun找不到
具体细节和上下文:
一、
rosrun找不到可执行文件,在devel/lib/包/中已经生成.o可执行文件
在rosrun时没有相应可执行文件

二、
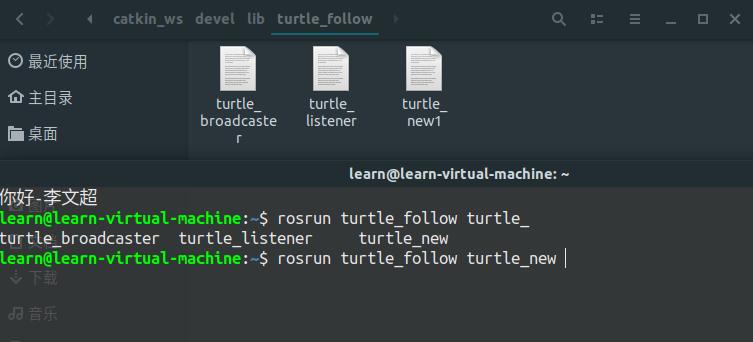
rosrun执行可执行文件是老文件,之前的turtle_new文件以及删除,新生成的为turtle_new1,但是rosrun找不到,而且仍然可以执行已经删除的turtle_new
尝试过的解决方法:
- 使用catkin_make clean进行清除缓存
- 删除build与devel文件夹再生成
- 不断刷新环境变量
-
在ROS(Robot Operating System)中,
rosrun命令用于运行某个ROS包的某个可执行文件。如果你遇到rosrun无法找到或运行你的可执行文件的问题,通常可能是由以下几个原因导致的:-
环境变量未正确设置:
- 确保你的
ROS_PACKAGE_PATH环境变量包含了你的工作空间目录(例如~/gongzuomul)。 - 重新启动你的终端或者重新加载
.bashrc文件(使用source ~/.bashrc),以确保所有环境变量更新。
- 确保你的
-
CMakeLists.txt 和 package.xml 配置错误:
- 检查你的
CMakeLists.txt文件,确保你已经正确添加了可执行文件的构建规则。 - 确保你的
package.xml文件中包含了<build_depend>和<exec_depend>标签,这些标签应该列出你的包依赖的其他ROS包。
- 检查你的
-
可执行文件的位置:
- 通常,ROS的可执行文件应该位于
devel/lib/<包名>/下的某个子目录中(如bin或nodes),而不是直接在lib目录下。 - 如果你的可执行文件直接位于
lib目录下,这可能是导致rosrun找不到它的原因。尝试将你的可执行文件移动到devel/lib/<包名>/bin/或devel/lib/<包名>/nodes/目录下。
- 通常,ROS的可执行文件应该位于
-
缓存问题:
- 你已经尝试过使用
catkin_make clean清除缓存,并删除build和devel文件夹。这是一个正确的步骤,但有时可能需要更彻底地清理。 - 确保在重新构建之前,你的工作空间是干净的,没有旧的或未正确生成的文件。
- 你已经尝试过使用
-
旧的可执行文件缓存:
- 如果
rosrun仍然运行旧的可执行文件,这可能是因为旧的二进制文件仍然在你的PATH中,或者在某些缓存中。 - 确保你的
PATH环境变量没有包含旧的路径。 - 尝试在终端中直接运行可执行文件(使用完整路径),看看是否运行的是新版本。
- 如果
-
重新构建和安装:
- 在删除
build和devel文件夹后,确保你重新运行了catkin_make或catkin build来重新构建你的工作空间。 - 如果你使用的是
catkin tools,确保你处于正确的工作空间目录中,并运行catkin build。
- 在删除
如果以上步骤仍然无法解决问题,可能需要更详细地检查你的ROS包的配置和构建日志,以找出可能的错误或不一致之处。
以上为生成回答,仅供参考~
-
-
@2307653350 看到了install目录,source install/setup.bash 然后再运行试试呢?
-
@小鱼 成功了,试了试还和VSCODE里面catkin_make的方式有关,以后注意下