vscode中使用jupyter插件,发现无法中断rclpy.spin执行
-
参照jupyter导入rclpy报错的解决方案,在vscode中安装了jupyter拓展,
参照3.2 编写ROS2代码
代码如下
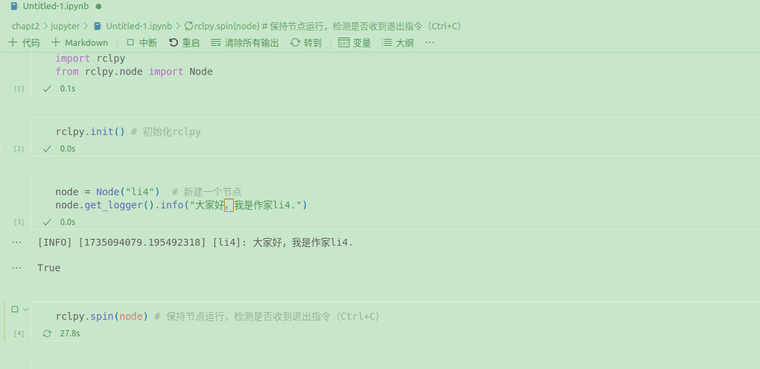
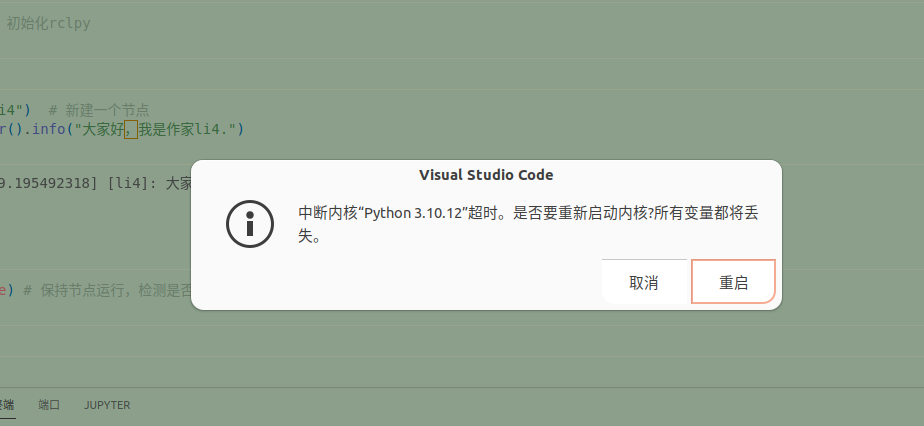
执行后发现rclpy行无法中断
执行中断后,发现上一次执行启动的节点并未关闭,出现了多个同名节点

-
@haojiezhanshi1999 感觉是运行了多个,没有关闭导致的,这个教程不维护了,看新版的,需要学jupyter,单独找个教程学吧
-
在使用 VSCode 的 Jupyter 插件运行 ROS 2(Robot Operating System 2)代码时,特别是在使用
rclpy.spin()函数时,可能会遇到一些问题,如无法中断执行或节点未能正确关闭。这通常是由于rclpy.spin()是一个阻塞调用,它会持续运行直到节点被显式关闭。在 Jupyter Notebook 或 JupyterLab 的环境中,这可能会导致一些特殊的行为,因为 Notebook 的每个单元格是独立执行的,但共享同一个 Python 解释器和进程空间。以下是一些可能的解决方案和建议:
1. 使用非阻塞方式运行节点
一个可能的解决方案是使用
rclpy.spin_once()或rclpy.spin_until_future_complete()替代rclpy.spin()。这些方法允许你更精细地控制节点的执行,并且可以在需要时中断或停止节点。import rclpy from rclpy.node import Node import asyncio class MyNode(Node): def __init__(self): super().__init__('my_node') async def main(args=None): rclpy.init(args=args) node = MyNode() try: with node: while True: rclpy.spin_once(node, timeout_sec=1.0) # 在这里你可以添加其他逻辑来检查是否需要退出循环 # 例如,基于某个条件或信号 await asyncio.sleep(1) finally: node.destroy_node() rclpy.shutdown() if __name__ == '__main__': asyncio.run(main())2. 使用线程或异步任务来管理节点
如果你需要在 Jupyter Notebook 中保持交互性,可以考虑将 ROS 2 节点的运行放在一个单独的线程或异步任务中。这样,你可以从主线程中控制节点的启动和停止。
3. 确保正确关闭节点
无论使用哪种方法,确保在不再需要节点时正确关闭它是非常重要的。使用
node.destroy_node()和rclpy.shutdown()来清理资源。4. 检查 Jupyter 和 VSCode 插件的版本
确保你使用的 Jupyter 和 VSCode 的 ROS 2 插件都是最新版本。有时候,插件的更新可以解决一些兼容性问题或错误。
5. 使用 ROS 2 的命令行工具
如果可能,考虑使用 ROS 2 的命令行工具(如
ros2 run)来运行你的节点,而不是在 Jupyter Notebook 中。这可以避免一些与 Notebook 环境相关的特定问题。6. 重启 Jupyter Kernel
如果节点未能正确关闭,你可能需要重启 Jupyter Kernel 来清理环境。这可以通过 Jupyter Notebook 界面上的 Kernel 菜单完成。
通过上述方法,你应该能够更好地控制 ROS 2 节点在 Jupyter Notebook 中的行为,并解决无法中断
rclpy.spin()或节点未能关闭的问题。
以上为生成回答,仅供参考~
-
@haojiezhanshi1999 感觉是运行了多个,没有关闭导致的,这个教程不维护了,看新版的,需要学jupyter,单独找个教程学吧
-
@小鱼 好的,了解了,感谢
-
H haojiezhanshi1999 将这个主题标记为已解决,在