建图导航问题
-
标题:如何实时进行建图
问题描述:
问题1:
1.现在在用树莓派5做一个小车建图项目,小车中没有imu模块传感器,是不是需要购买一个imu模块,然后才能确定小车在地图中的位置,进行实时扫描。
问题2:
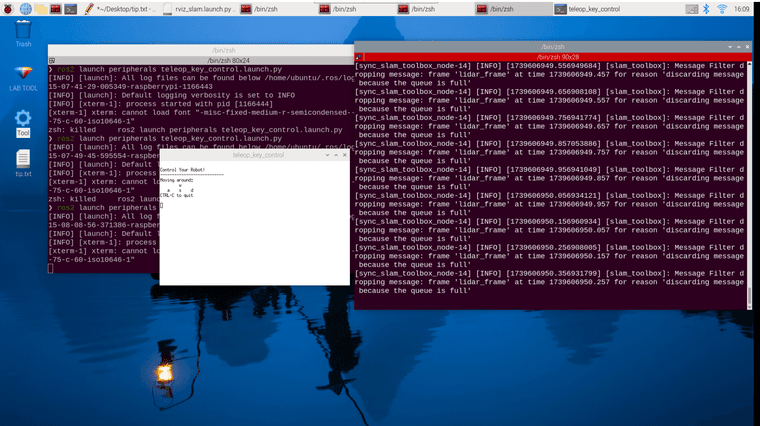
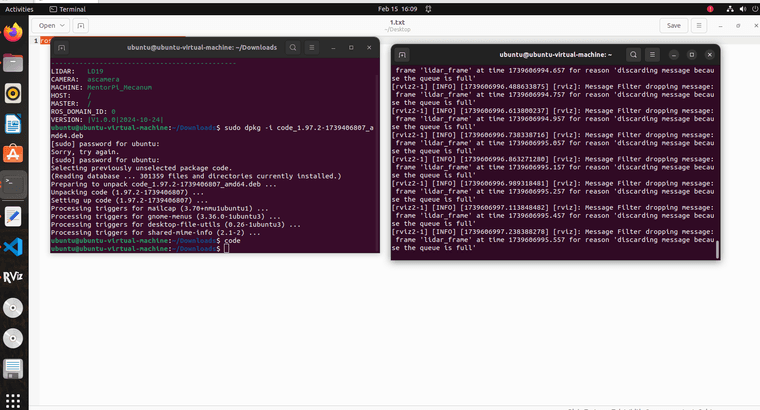
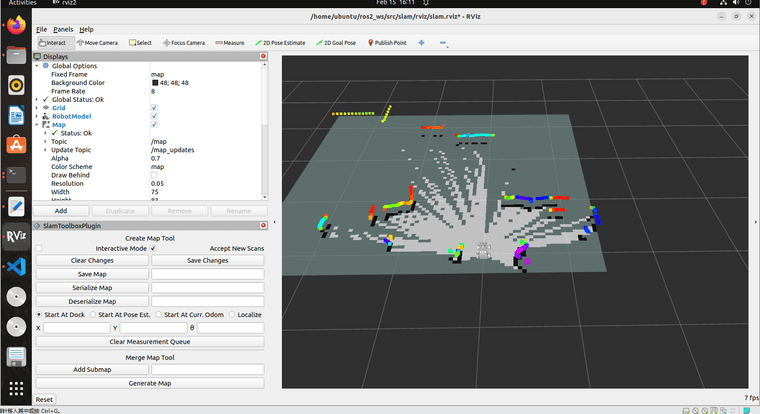
在进行建图过程中,通过在同一局域网下,VNC和虚拟机进行配合建图,虚拟机在rviz2获得雷达节点以及图形,接下来在使用键盘控制时,一发起键盘控制,就显示消息队列已满?这是什么问题导致的。具体细节和上下文:
-
问题1
关于是否需要IMU模块:
在使用树莓派5进行小车建图项目时,IMU(惯性测量单元)模块并不是绝对必需的,但它可以提供有价值的信息来帮助确定小车在地图中的位置和姿态。
- IMU模块的作用:IMU模块通常包含加速度计、陀螺仪(有时还包括磁力计),可以提供小车的加速度、角速度和方向等信息。这些信息对于实现精确定位和导航至关重要,特别是在没有GPS信号或GPS信号不稳定的环境中。
- 无IMU模块的情况:如果没有IMU模块,小车仍然可以通过其他传感器(如激光雷达、摄像头等)进行建图和定位。这些传感器可以提供环境信息,通过算法处理(如SLAM算法)来确定小车的位置和姿态。然而,这种方法可能受到环境噪声、遮挡物等因素的影响,导致定位精度下降。
- 替代方案:如果预算有限或不想增加硬件复杂度,可以考虑通过算法优化来提高定位精度。例如,使用更先进的SLAM算法、融合多种传感器数据(如激光雷达和摄像头)来提高鲁棒性和精度。
综上所述,虽然IMU模块可以提供有价值的信息来帮助确定小车在地图中的位置和姿态,但并不是绝对必需的。在没有IMU模块的情况下,仍然可以通过其他传感器和算法来实现建图和定位。
问题2
关于VNC和虚拟机配合建图时键盘控制显示消息队列已满的问题:
这个问题可能是由多种原因导致的,以下是一些可能的解决方案:
- 检查网络带宽和延迟:VNC和虚拟机之间的通信需要足够的网络带宽和低延迟。如果网络带宽不足或延迟过高,可能会导致消息队列积压和溢出。可以尝试优化网络环境或降低VNC的图像质量来减少网络带宽占用。
- 调整VNC和虚拟机的设置:检查VNC服务器和客户端的设置,确保它们之间的连接是稳定和高效的。同时,也要检查虚拟机的资源分配情况,确保虚拟机有足够的CPU、内存和磁盘I/O等资源来处理雷达数据和图形渲染任务。
- 优化键盘控制程序:如果键盘控制程序是自定义的,可能需要检查其代码是否存在效率问题或资源泄漏等问题。可以尝试优化代码、减少不必要的计算和资源占用,或者使用更高效的数据结构和算法来提高程序性能。
- 考虑使用其他远程控制工具:如果VNC无法满足需求,可以考虑使用其他远程控制工具来替代。例如,TeamViewer、AnyDesk等工具可能具有更好的性能和稳定性,可以适应更复杂的远程控制场景。
综上所述,解决VNC和虚拟机配合建图时键盘控制显示消息队列已满的问题需要从多个方面入手,包括检查网络带宽和延迟、调整VNC和虚拟机的设置、优化键盘控制程序以及考虑使用其他远程控制工具等。
以上为生成回答,仅供参考~
-
@小伊 imu模块是否可以包括imu传感器和里程计
-
IMU(Inertial Measurement Unit,惯性测量单元)模块与里程计在功能和组成上存在一定的区别,但它们可以在某些系统中结合使用以实现更全面的定位和运动状态监测。以下是对IMU模块和里程计的详细分析,以及它们是否可以包括在同一系统或模块中的探讨:
IMU模块
IMU模块是一种惯性传感器模块,它通常包含以下核心传感器:
- 加速度计:用于测量线性加速度,可以推算物体的运动状态(速度、位移)。
- 陀螺仪:用于测量角速度,可以推算物体的旋转角度。
- 磁力计(部分IMU包含):通过检测地球磁场,提供物体相对于地磁北方向的航向角。
IMU模块的主要功能是姿态估计、测量物体的线性加速度和旋转角速度以推算运动轨迹,以及导航与定位(尤其是在GPS信号较弱或失效的环境中提供短时间的惯性导航能力)。
里程计
里程计是一种用于测量物体(尤其是车辆)行驶距离的装置和技术。在移动机器人的研究和应用中,里程计是实现自主导航、路径规划、定位、地图构建等功能的关键技术之一。里程计可以通过不同类型的传感器实现,如轮式里程计、激光里程计、视觉里程计等。它采用增量式递推的方法,实时估计物体的位置、姿态等物理量,但会存在累积误差的问题。
IMU模块与里程计的结合
虽然IMU模块和里程计在功能和组成上有所不同,但它们可以在同一系统中结合使用。例如,在自动驾驶、无人机导航、移动机器人等领域,IMU模块可以提供短时间的惯性导航能力和姿态估计,而里程计则可以提供更准确的相对定位信息。通过传感器融合算法(如Kalman滤波等),可以将IMU模块和里程计的数据结合起来,以提高定位精度和稳定性。
然而,从严格意义上讲,IMU模块本身并不包含里程计。里程计是一种独立的测量技术和装置,而IMU模块则是一种包含加速度计、陀螺仪和(可能)磁力计的惯性传感器模块。因此,在描述或定义IMU模块时,通常不会将其与里程计混为一谈。
综上所述,IMU模块和里程计是两种不同的技术和装置,但它们可以在同一系统中结合使用以实现更全面的定位和运动状态监测。在描述或定义时,应明确区分它们的功能和组成。
以上为生成回答,仅供参考~
-
@小伊 [sync_slam_toolbox_node-14] [INFO] [1739607808.012283947] [slam_toolbox]:消息过滤器丢弃消息:帧‘lidar_frame’在时间1739607807.910的原因是‘丢弃消息,因为队列已满’
这个问题有解决办法么? -
这条日志信息表示在使用 SLAM Toolbox(一个常用于机器人定位和地图创建的库)时,消息过滤器丢弃了一个来自 'lidar_frame' 框架的消息,原因是相关的消息队列已经满了。这通常发生在数据生成速率(如激光雷达扫描的速率)超过了系统处理这些数据的能力时。以下是一些可能的解决方案:
-
增加队列大小:
- 检查 SLAM Toolbox 或相关 ROS 节点中消息队列的配置。尝试增加队列的大小,以允许更多的消息在等待处理时存储在队列中。这可以在启动文件中设置,或者通过代码中的参数调整。
-
优化数据处理:
- 检查 SLAM Toolbox 的数据处理逻辑,看是否有可能进行优化。例如,减少不必要的计算或优化算法以提高效率。
-
降低数据生成速率:
- 如果可能,调整激光雷达的扫描频率或分辨率。较低的扫描频率或分辨率可以减少数据生成量,从而减轻处理负担。
-
使用硬件加速:
- 如果硬件支持,考虑使用 GPU 加速数据处理。这可以显著提高处理速度,尤其是在处理大量数据时。
-
资源监控和调整:
- 监控系统的 CPU 和内存使用情况,确保 SLAM Toolbox 和其他相关进程有足够的资源运行。根据需要调整资源分配或关闭不必要的后台程序。
-
分布式处理:
- 如果系统支持,考虑将数据处理任务分布到多个计算节点上。这可以通过 ROS 的多机通信功能实现,使得数据处理更加高效。
-
日志级别调整:
- 考虑调整日志级别,以减少不必要的日志输出,这有助于更清晰地看到关键信息,同时减少日志处理对系统资源的占用。
-
调试和错误检查:
- 确保所有相关的硬件和软件组件都正确配置且没有错误。错误的配置或硬件故障也可能导致数据处理瓶颈。
实施上述解决方案时,建议逐一尝试,并监控系统的响应,以确定哪种方法最有效。在某些情况下,可能需要结合多种策略来解决问题。
以上为生成回答,仅供参考~
-