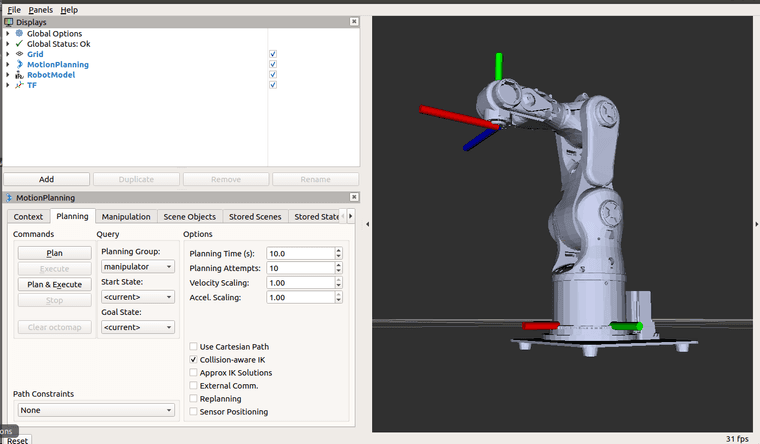
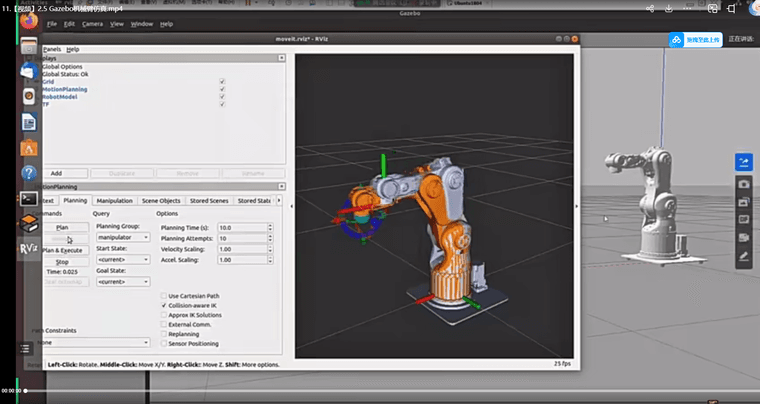
rviz中的机械臂末端无法像教程上一样拖动
-
我的操作界面截图和教程截图如下所示:
在ros终端中运行的代码如下:(base) wlz@ubuntu:~/ros_basic/src$ catkin build
Profile: default
Extending: [cached] /opt/ros/melodic
Workspace: /home/wlz/ros_basicBuild Space: [exists] /home/wlz/ros_basic/build
Devel Space: [exists] /home/wlz/ros_basic/devel
Install Space: [unused] /home/wlz/ros_basic/install
Log Space: [exists] /home/wlz/ros_basic/logs
Source Space: [exists] /home/wlz/ros_basic/src
DESTDIR: [unused] NoneDevel Space Layout: linked
Install Space Layout: NoneAdditional CMake Args: None
Additional Make Args: None
Additional catkin Make Args: None
Internal Make Job Server: True
Cache Job Environments: FalseWhitelisted Packages: None
Blacklisted Packages: NoneWorkspace configuration appears valid.
Traceback (most recent call last):
File "/usr/bin/catkin", line 11, in <module>
load_entry_point('catkin-tools==0.6.1', 'console_scripts', 'catkin')()
File "/usr/lib/python2.7/dist-packages/catkin_tools/commands/catkin.py", line 272, in main
catkin_main(sysargs)
File "/usr/lib/python2.7/dist-packages/catkin_tools/commands/catkin.py", line 267, in catkin_main
sys.exit(args.main(args) or 0)
File "/usr/lib/python2.7/dist-packages/catkin_tools/verbs/catkin_build/cli.py", line 422, in main
summarize_build=opts.summarize # Can be True, False, or None
File "/usr/lib/python2.7/dist-packages/catkin_tools/verbs/catkin_build/build.py", line 286, in build_isolated_workspace
built_packages, unbuilt_pkgs = get_built_unbuilt_packages(context, workspace_packages)
File "/usr/lib/python2.7/dist-packages/catkin_tools/verbs/catkin_build/build.py", line 151, in get_built_unbuilt_packages
find_packages(context.package_metadata_path(), warnings=[]).items()])
File "/usr/lib/python2.7/dist-packages/catkin_pkg/packages.py", line 103, in find_packages
raise RuntimeError('\n'.join(duplicates))
RuntimeError: Multiple packages found with the same name "UR3":- UR3
- ur3
(base) wlz@ubuntu:~/ros_basic/src$ cd ..
(base) wlz@ubuntu:~/ros_basic$ source devel/setup.bash
(base) wlz@ubuntu:~/ros_basic$ roslaunch probot_gazebo probot_anno_bringup_moveit.launch
WARNING: Package name "UR3" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
... logging to /home/wlz/.ros/log/e71312aa-feee-11ef-be91-000c29aa3a06/roslaunch-ubuntu-2926.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
WARNING: Package name "UR3" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
xacro: in-order processing became default in ROS Melodic. You can drop the option.
started roslaunch server http://ubuntu:35591/SUMMARY
PARAMETERS
- /gazebo/enable_ros_network: True
- /joint_state_publisher/use_gui: False
- /joint_state_publisher_gui/use_gui: False
- /move_group/allow_trajectory_execution: True
- /move_group/capabilities:
- /move_group/controller_list: [{'default': True...
- /move_group/controller_manager_ns: controller_manager
- /move_group/disable_capabilities:
- /move_group/jiggle_fraction: 0.05
- /move_group/manipulator/default_planner_config: RRT
- /move_group/manipulator/longest_valid_segment_fraction: 0.005
- /move_group/manipulator/planner_configs: ['SBL', 'EST', 'L...
- /move_group/manipulator/projection_evaluator: joints(joint_1,jo...
- /move_group/max_range: 5.0
- /move_group/max_safe_path_cost: 1
- /move_group/moveit_controller_manager: moveit_simple_con...
- /move_group/moveit_manage_controllers: True
- /move_group/octomap_resolution: 0.025
- /move_group/planner_configs/BFMT/balanced: 0
- /move_group/planner_configs/BFMT/cache_cc: 1
- /move_group/planner_configs/BFMT/extended_fmt: 1
- /move_group/planner_configs/BFMT/heuristics: 1
- /move_group/planner_configs/BFMT/nearest_k: 1
- /move_group/planner_configs/BFMT/num_samples: 1000
- /move_group/planner_configs/BFMT/optimality: 1
- /move_group/planner_configs/BFMT/radius_multiplier: 1.0
- /move_group/planner_configs/BFMT/type: geometric::BFMT
- /move_group/planner_configs/BKPIECE/border_fraction: 0.9
- /move_group/planner_configs/BKPIECE/failed_expansion_score_factor: 0.5
- /move_group/planner_configs/BKPIECE/min_valid_path_fraction: 0.5
- /move_group/planner_configs/BKPIECE/range: 0.0
- /move_group/planner_configs/BKPIECE/type: geometric::BKPIECE
- /move_group/planner_configs/BiEST/range: 0.0
- /move_group/planner_configs/BiEST/type: geometric::BiEST
- /move_group/planner_configs/BiTRRT/cost_threshold: 1e300
- /move_group/planner_configs/BiTRRT/frountier_node_ratio: 0.1
- /move_group/planner_configs/BiTRRT/frountier_threshold: 0.0
- /move_group/planner_configs/BiTRRT/init_temperature: 100
- /move_group/planner_configs/BiTRRT/range: 0.0
- /move_group/planner_configs/BiTRRT/temp_change_factor: 0.1
- /move_group/planner_configs/BiTRRT/type: geometric::BiTRRT
- /move_group/planner_configs/EST/goal_bias: 0.05
- /move_group/planner_configs/EST/range: 0.0
- /move_group/planner_configs/EST/type: geometric::EST
- /move_group/planner_configs/FMT/cache_cc: 1
- /move_group/planner_configs/FMT/extended_fmt: 1
- /move_group/planner_configs/FMT/heuristics: 0
- /move_group/planner_configs/FMT/nearest_k: 1
- /move_group/planner_configs/FMT/num_samples: 1000
- /move_group/planner_configs/FMT/radius_multiplier: 1.1
- /move_group/planner_configs/FMT/type: geometric::FMT
- /move_group/planner_configs/KPIECE/border_fraction: 0.9
- /move_group/planner_configs/KPIECE/failed_expansion_score_factor: 0.5
- /move_group/planner_configs/KPIECE/goal_bias: 0.05
- /move_group/planner_configs/KPIECE/min_valid_path_fraction: 0.5
- /move_group/planner_configs/KPIECE/range: 0.0
- /move_group/planner_configs/KPIECE/type: geometric::KPIECE
- /move_group/planner_configs/LBKPIECE/border_fraction: 0.9
- /move_group/planner_configs/LBKPIECE/min_valid_path_fraction: 0.5
- /move_group/planner_configs/LBKPIECE/range: 0.0
- /move_group/planner_configs/LBKPIECE/type: geometric::LBKPIECE
- /move_group/planner_configs/LBTRRT/epsilon: 0.4
- /move_group/planner_configs/LBTRRT/goal_bias: 0.05
- /move_group/planner_configs/LBTRRT/range: 0.0
- /move_group/planner_configs/LBTRRT/type: geometric::LBTRRT
- /move_group/planner_configs/LazyPRM/range: 0.0
- /move_group/planner_configs/LazyPRM/type: geometric::LazyPRM
- /move_group/planner_configs/LazyPRMstar/type: geometric::LazyPR...
- /move_group/planner_configs/PDST/type: geometric::PDST
- /move_group/planner_configs/PRM/max_nearest_neighbors: 10
- /move_group/planner_configs/PRM/type: geometric::PRM
- /move_group/planner_configs/PRMstar/type: geometric::PRMstar
- /move_group/planner_configs/ProjEST/goal_bias: 0.05
- /move_group/planner_configs/ProjEST/range: 0.0
- /move_group/planner_configs/ProjEST/type: geometric::ProjEST
- /move_group/planner_configs/RRT/goal_bias: 0.05
- /move_group/planner_configs/RRT/range: 0.8
- /move_group/planner_configs/RRT/type: geometric::RRT
- /move_group/planner_configs/RRTConnect/range: 0.0
- /move_group/planner_configs/RRTConnect/type: geometric::RRTCon...
- /move_group/planner_configs/RRTstar/delay_collision_checking: 1
- /move_group/planner_configs/RRTstar/goal_bias: 0.05
- /move_group/planner_configs/RRTstar/range: 0.0
- /move_group/planner_configs/RRTstar/type: geometric::RRTstar
- /move_group/planner_configs/SBL/range: 0.0
- /move_group/planner_configs/SBL/type: geometric::SBL
- /move_group/planner_configs/SPARS/dense_delta_fraction: 0.001
- /move_group/planner_configs/SPARS/max_failures: 1000
- /move_group/planner_configs/SPARS/sparse_delta_fraction: 0.25
- /move_group/planner_configs/SPARS/stretch_factor: 3.0
- /move_group/planner_configs/SPARS/type: geometric::SPARS
- /move_group/planner_configs/SPARStwo/dense_delta_fraction: 0.001
- /move_group/planner_configs/SPARStwo/max_failures: 5000
- /move_group/planner_configs/SPARStwo/sparse_delta_fraction: 0.25
- /move_group/planner_configs/SPARStwo/stretch_factor: 3.0
- /move_group/planner_configs/SPARStwo/type: geometric::SPARStwo
- /move_group/planner_configs/STRIDE/degree: 16
- /move_group/planner_configs/STRIDE/estimated_dimension: 0.0
- /move_group/planner_configs/STRIDE/goal_bias: 0.05
- /move_group/planner_configs/STRIDE/max_degree: 18
- /move_group/planner_configs/STRIDE/max_pts_per_leaf: 6
- /move_group/planner_configs/STRIDE/min_degree: 12
- /move_group/planner_configs/STRIDE/min_valid_path_fraction: 0.2
- /move_group/planner_configs/STRIDE/range: 0.0
- /move_group/planner_configs/STRIDE/type: geometric::STRIDE
- /move_group/planner_configs/STRIDE/use_projected_distance: 0
- /move_group/planner_configs/TRRT/frountierNodeRatio: 0.1
- /move_group/planner_configs/TRRT/frountier_threshold: 0.0
- /move_group/planner_configs/TRRT/goal_bias: 0.05
- /move_group/planner_configs/TRRT/init_temperature: 10e-6
- /move_group/planner_configs/TRRT/k_constant: 0.0
- /move_group/planner_configs/TRRT/max_states_failed: 10
- /move_group/planner_configs/TRRT/min_temperature: 10e-10
- /move_group/planner_configs/TRRT/range: 0.0
- /move_group/planner_configs/TRRT/temp_change_factor: 2.0
- /move_group/planner_configs/TRRT/type: geometric::TRRT
- /move_group/planning_plugin: ompl_interface/OM...
- /move_group/planning_scene_monitor/publish_geometry_updates: True
- /move_group/planning_scene_monitor/publish_planning_scene: True
- /move_group/planning_scene_monitor/publish_state_updates: True
- /move_group/planning_scene_monitor/publish_transforms_updates: True
- /move_group/request_adapters: default_planner_r...
- /move_group/start_state_max_bounds_error: 0.1
- /move_group/trajectory_execution/allowed_execution_duration_scaling: 1.5
- /move_group/trajectory_execution/allowed_goal_duration_margin: 0.5
- /move_group/trajectory_execution/allowed_start_tolerance: 0.1
- /probot_anno/arm_joint_controller/gains/joint_1/d: 0.1
- /probot_anno/arm_joint_controller/gains/joint_1/i: 0.0
- /probot_anno/arm_joint_controller/gains/joint_1/i_clamp: 0.0
- /probot_anno/arm_joint_controller/gains/joint_1/p: 1000.0
- /probot_anno/arm_joint_controller/gains/joint_2/d: 0.1
- /probot_anno/arm_joint_controller/gains/joint_2/i: 0.0
- /probot_anno/arm_joint_controller/gains/joint_2/i_clamp: 0.0
- /probot_anno/arm_joint_controller/gains/joint_2/p: 1000.0
- /probot_anno/arm_joint_controller/gains/joint_3/d: 0.1
- /probot_anno/arm_joint_controller/gains/joint_3/i: 0.0
- /probot_anno/arm_joint_controller/gains/joint_3/i_clamp: 0.0
- /probot_anno/arm_joint_controller/gains/joint_3/p: 1000.0
- /probot_anno/arm_joint_controller/gains/joint_4/d: 0.1
- /probot_anno/arm_joint_controller/gains/joint_4/i: 0.0
- /probot_anno/arm_joint_controller/gains/joint_4/i_clamp: 0.0
- /probot_anno/arm_joint_controller/gains/joint_4/p: 1000.0
- /probot_anno/arm_joint_controller/gains/joint_5/d: 0.1
- /probot_anno/arm_joint_controller/gains/joint_5/i: 0.0
- /probot_anno/arm_joint_controller/gains/joint_5/i_clamp: 0.0
- /probot_anno/arm_joint_controller/gains/joint_5/p: 1000.0
- /probot_anno/arm_joint_controller/gains/joint_6/d: 0.1
- /probot_anno/arm_joint_controller/gains/joint_6/i: 0.0
- /probot_anno/arm_joint_controller/gains/joint_6/i_clamp: 0.0
- /probot_anno/arm_joint_controller/gains/joint_6/p: 1000.0
- /probot_anno/arm_joint_controller/joints: ['joint_1', 'join...
- /probot_anno/arm_joint_controller/type: position_controll...
- /probot_anno/joint_state_controller/publish_rate: 50
- /probot_anno/joint_state_controller/type: joint_state_contr...
- /robot_description: <?xml version="1....
- /robot_description_kinematics/manipulator/kinematics_solver: trac_ik_kinematic...
- /robot_description_kinematics/manipulator/kinematics_solver_attempts: 3
- /robot_description_kinematics/manipulator/kinematics_solver_search_resolution: 0.005
- /robot_description_kinematics/manipulator/kinematics_solver_timeout: 0.005
- /robot_description_planning/joint_limits/joint_1/has_acceleration_limits: True
- /robot_description_planning/joint_limits/joint_1/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint_1/max_acceleration: 1
- /robot_description_planning/joint_limits/joint_1/max_velocity: 0.9
- /robot_description_planning/joint_limits/joint_2/has_acceleration_limits: True
- /robot_description_planning/joint_limits/joint_2/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint_2/max_acceleration: 1
- /robot_description_planning/joint_limits/joint_2/max_velocity: 0.4
- /robot_description_planning/joint_limits/joint_3/has_acceleration_limits: True
- /robot_description_planning/joint_limits/joint_3/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint_3/max_acceleration: 1
- /robot_description_planning/joint_limits/joint_3/max_velocity: 0.5
- /robot_description_planning/joint_limits/joint_4/has_acceleration_limits: True
- /robot_description_planning/joint_limits/joint_4/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint_4/max_acceleration: 1
- /robot_description_planning/joint_limits/joint_4/max_velocity: 0.4
- /robot_description_planning/joint_limits/joint_5/has_acceleration_limits: True
- /robot_description_planning/joint_limits/joint_5/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint_5/max_acceleration: 1
- /robot_description_planning/joint_limits/joint_5/max_velocity: 0.4
- /robot_description_planning/joint_limits/joint_6/has_acceleration_limits: True
- /robot_description_planning/joint_limits/joint_6/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint_6/max_acceleration: 1
- /robot_description_planning/joint_limits/joint_6/max_velocity: 1.2
- /robot_description_semantic: <?xml version="1....
- /rosdistro: melodic
- /rosversion: 1.14.13
- /rviz_ubuntu_2926_1495605443060269914/manipulator/kinematics_solver: trac_ik_kinematic...
- /rviz_ubuntu_2926_1495605443060269914/manipulator/kinematics_solver_attempts: 3
- /rviz_ubuntu_2926_1495605443060269914/manipulator/kinematics_solver_search_resolution: 0.005
- /rviz_ubuntu_2926_1495605443060269914/manipulator/kinematics_solver_timeout: 0.005
- /source_list: ['/joint_states']
- /use_sim_time: True
NODES
/
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
joint_state_publisher (joint_state_publisher/joint_state_publisher)
joint_state_publisher_gui (joint_state_publisher_gui/joint_state_publisher_gui)
move_group (moveit_ros_move_group/move_group)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz_ubuntu_2926_1495605443060269914 (rviz/rviz)
urdf_spawner (gazebo_ros/spawn_model)
/probot_anno/
arm_controller_spawner (controller_manager/spawner)
joint_controller_spawner (controller_manager/spawner)auto-starting new master
process[master]: started with pid [2940]
ROS_MASTER_URI=http://localhost:11311setting /run_id to e71312aa-feee-11ef-be91-000c29aa3a06
WARNING: Package name "UR3" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
process[rosout-1]: started with pid [2951]
started core service [/rosout]
process[gazebo-2]: started with pid [2954]
process[gazebo_gui-3]: started with pid [2957]
process[urdf_spawner-4]: started with pid [2963]
process[probot_anno/joint_controller_spawner-5]: started with pid [2965]
process[robot_state_publisher-6]: started with pid [2966]
process[probot_anno/arm_controller_spawner-7]: started with pid [2967]
process[move_group-8]: started with pid [2972]
process[rviz_ubuntu_2926_1495605443060269914-9]: started with pid [2973]
ERROR: cannot launch node of type [joint_state_publisher_gui/joint_state_publisher_gui]: joint_state_publisher_gui
ROS path [0]=/opt/ros/melodic/share/ros
ROS path [1]=/home/wlz/ros_basic/src/ur3
ROS path [2]=/home/wlz/ros_basic/src/probot_description
ROS path [3]=/home/wlz/ros_basic/src/probot_anno_moveit_config
ROS path [4]=/home/wlz/ros_basic/src/probot_gazebo
ROS path [5]=/home/wlz/ros_basic/src/ros_communication
ROS path [6]=/home/wlz/ros_basic/src/ros_define_data
ROS path [7]=/home/wlz/ros_basic/src/ur3_moveit_config
ROS path [8]=/opt/ros/melodic/share
WARNING: Package name "UR3" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
WARNING: Package name "UR3" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
process[joint_state_publisher-11]: started with pid [2980]
WARNING: Package name "UR3" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
WARNING: Package name "UR3" does not follow the naming conventions. It should start with a lower case letter and only contain lower case letters, digits, underscores, and dashes.
[ INFO] [1741748751.314187494]: Loading robot model 'probot_anno'...
[ INFO] [1741748751.314874871]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ WARN] [1741748751.655729646]: Kinematics solver doesn't support #attempts anymore, but only a timeout.
Please remove the parameter '/robot_description_kinematics/manipulator/kinematics_solver_attempts' from your configuration.
[ERROR] [1741748751.663388884]: The kinematics plugin (manipulator) failed to load. Error: According to the loaded plugin descriptions the class trac_ik_kinematics_plugin/TRAC_IKKinematicsPlugin with base class type kinematics::KinematicsBase does not exist. Declared types are cached_ik_kinematics_plugin/CachedKDLKinematicsPlugin cached_ik_kinematics_plugin/CachedSrvKinematicsPlugin kdl_kinematics_plugin/KDLKinematicsPlugin lma_kinematics_plugin/LMAKinematicsPlugin srv_kinematics_plugin/SrvKinematicsPlugin
[ERROR] [1741748751.663452058]: Kinematics solver could not be instantiated for joint group manipulator.
[ INFO] [1741748751.687984623]: rviz version 1.13.30
[ INFO] [1741748751.688100433]: compiled against Qt version 5.9.5
[ INFO] [1741748751.688117144]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1741748751.691254544]: Forcing OpenGl version 0.
[INFO] [1741748751.960509, 0.000000]: Controller Spawner: Waiting for service controller_manager/load_controller
[INFO] [1741748751.980046, 0.000000]: Controller Spawner: Waiting for service controller_manager/load_controller
[ INFO] [1741748752.001239361]: Publishing maintained planning scene on 'monitored_planning_scene'
[ INFO] [1741748752.028710056]: MoveGroup debug mode is OFF
Starting planning scene monitors...
[ INFO] [1741748752.028738284]: Starting planning scene monitor
[ INFO] [1741748752.035957353]: Listening to '/planning_scene'
[ INFO] [1741748752.036013020]: Starting world geometry update monitor for collision objects, attached objects, octomap updates.
[ INFO] [1741748752.036594239]: Listening to '/collision_object'
[ INFO] [1741748752.037124754]: Listening to '/planning_scene_world' for planning scene world geometry
[ INFO] [1741748752.037433225]: No 3D sensor plugin(s) defined for octomap updates
[ INFO] [1741748752.088137558]: Listening to '/attached_collision_object' for attached collision objects
Planning scene monitors started.
[ERROR] [1741748752.088994779]: Exception while loading planner 'ompl_interface/OMPLPlanner': According to the loaded plugin descriptions the class ompl_interface/OMPLPlanner with base class type planning_interface::PlannerManager does not exist. Declared types are
Available plugins:
[ INFO] [1741748752.091681990]: Param 'default_workspace_bounds' was not set. Using default value: 10
[ INFO] [1741748752.091990970]: Param 'start_state_max_bounds_error' was set to 0.1
[ INFO] [1741748752.092124835]: Param 'start_state_max_dt' was not set. Using default value: 0.5
[ INFO] [1741748752.092353104]: Param 'start_state_max_dt' was not set. Using default value: 0.5
[ INFO] [1741748752.092479794]: Param 'jiggle_fraction' was set to 0.05
[ INFO] [1741748752.092593561]: Param 'max_sampling_attempts' was not set. Using default value: 100
[ INFO] [1741748752.092628859]: Using planning request adapter 'Add Time Parameterization'
[ INFO] [1741748752.092655701]: Using planning request adapter 'Fix Workspace Bounds'
[ INFO] [1741748752.092673123]: Using planning request adapter 'Fix Start State Bounds'
[ INFO] [1741748752.092686231]: Using planning request adapter 'Fix Start State In Collision'
[ INFO] [1741748752.092699519]: Using planning request adapter 'Fix Start State Path Constraints'
[FATAL] [1741748752.093669434]: Exception while loading controller manager 'moveit_simple_controller_manager/MoveItSimpleControllerManager': According to the loaded plugin descriptions the class moveit_simple_controller_manager/MoveItSimpleControllerManager with base class type moveit_controller_manager::MoveItControllerManager does not exist. Declared types are
[ INFO] [1741748752.096607562]: Trajectory execution is managing controllers
Loading 'move_group/ApplyPlanningSceneService'...
Loading 'move_group/ClearOctomapService'...
Loading 'move_group/MoveGroupCartesianPathService'...
Loading 'move_group/MoveGroupExecuteTrajectoryAction'...
Loading 'move_group/MoveGroupGetPlanningSceneService'...
Loading 'move_group/MoveGroupKinematicsService'...
Loading 'move_group/MoveGroupMoveAction'...
Loading 'move_group/MoveGroupPickPlaceAction'...
Loading 'move_group/MoveGroupPlanService'...
Loading 'move_group/MoveGroupQueryPlannersService'...
Loading 'move_group/MoveGroupStateValidationService'...
[ INFO] [1741748752.127074806]:
- MoveGroup using:
-
- ApplyPlanningSceneService -
- ClearOctomapService -
- CartesianPathService -
- ExecuteTrajectoryAction -
- GetPlanningSceneService -
- KinematicsService -
- MoveAction -
- PickPlaceAction -
- MotionPlanService -
- QueryPlannersService -
- StateValidationService
[ WARN] [1741748752.127259877]: MoveGroup running was unable to load ompl_interface/OMPLPlanner
[ INFO] [1741748752.252103720]: Stereo is NOT SUPPORTED
[ INFO] [1741748752.252245520]: OpenGL device: SVGA3D; build: RELEASE; LLVM;
[ INFO] [1741748752.252285053]: OpenGl version: 2.1 (GLSL 1.2).
[ INFO] [1741748752.258619049]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1741748752.260842506]: waitForService: Service [/gazebo_gui/set_physics_properties] has not been advertised, waiting...
[ INFO] [1741748752.262608102]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1741748752.264561554]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[INFO] [1741748752.527937, 0.000000]: Loading model XML from ros parameter robot_description
[INFO] [1741748752.532891, 0.000000]: Waiting for service /gazebo/spawn_urdf_model
[ INFO] [1741748753.766751220]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1741748753.795361965, 0.011000000]: Physics dynamic reconfigure ready.
[INFO] [1741748754.038910, 0.240000]: Calling service /gazebo/spawn_urdf_model
[INFO] [1741748754.193881, 0.316000]: Spawn status: SpawnModel: Successfully spawned entity
[ INFO] [1741748754.273691843, 0.316000000]: Loading gazebo_ros_control plugin
[ INFO] [1741748754.273897953, 0.316000000]: Starting gazebo_ros_control plugin in namespace: /probot_anno
[ INFO] [1741748754.274318549, 0.316000000]: gazebo_ros_control plugin is waiting for model URDF in parameter [/robot_description] on the ROS param server.
[urdf_spawner-4] process has finished cleanly
log file: /home/wlz/.ros/log/e71312aa-feee-11ef-be91-000c29aa3a06/urdf_spawner-4*.log
[ERROR] [1741748754.393138102, 0.316000000]: No p gain specified for pid. Namespace: /probot_anno/gazebo_ros_control/pid_gains/joint_1
[ERROR] [1741748754.401687352, 0.316000000]: No p gain specified for pid. Namespace: /probot_anno/gazebo_ros_control/pid_gains/joint_2
[ERROR] [1741748754.401971250, 0.316000000]: No p gain specified for pid. Namespace: /probot_anno/gazebo_ros_control/pid_gains/joint_3
[ERROR] [1741748754.402202429, 0.316000000]: No p gain specified for pid. Namespace: /probot_anno/gazebo_ros_control/pid_gains/joint_4
[ERROR] [1741748754.402439440, 0.316000000]: No p gain specified for pid. Namespace: /probot_anno/gazebo_ros_control/pid_gains/joint_5
[ERROR] [1741748754.402640442, 0.316000000]: No p gain specified for pid. Namespace: /probot_anno/gazebo_ros_control/pid_gains/joint_6
[ INFO] [1741748754.409493328, 0.316000000]: Loaded gazebo_ros_control.
[INFO] [1741748754.669631, 0.569000]: Controller Spawner: Waiting for service controller_manager/switch_controller
[INFO] [1741748754.676784, 0.575000]: Controller Spawner: Waiting for service controller_manager/unload_controller
[INFO] [1741748754.678404, 0.576000]: Loading controller: joint_state_controller
[INFO] [1741748754.686559, 0.583000]: Controller Spawner: Loaded controllers: joint_state_controller
[INFO] [1741748754.691935, 0.587000]: Started controllers: joint_state_controller
[INFO] [1741748754.694690, 0.000000]: Controller Spawner: Waiting for service controller_manager/switch_controller
[INFO] [1741748754.700545, 0.000000]: Controller Spawner: Waiting for service controller_manager/unload_controller
[INFO] [1741748754.708429, 0.000000]: Loading controller: arm_joint_controller
[ERROR] [1741748754.719768026, 0.612000000]: Could not load controller 'arm_joint_controller' because controller type 'position_controllers/JointTrajectoryController' does not exist.
[ERROR] [1741748754.719795088, 0.612000000]: Use 'rosservice call controller_manager/list_controller_types' to get the available types
[ERROR] [1741748755.720147, 1.601000]: Failed to load arm_joint_controller
[INFO] [1741748755.720875, 1.601000]: Controller Spawner: Loaded controllers:
[INFO] [1741748755.723128, 1.604000]: Started controllers:
[ INFO] [1741748757.197492780, 3.052000000]: Loading robot model 'probot_anno'...
[ INFO] [1741748757.197577957, 3.052000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ WARN] [1741748757.264020900, 3.119000000]: Kinematics solver doesn't support #attempts anymore, but only a timeout.
Please remove the parameter '/rviz_ubuntu_2926_1495605443060269914/manipulator/kinematics_solver_attempts' from your configuration.
[ERROR] [1741748757.267441642, 3.122000000]: The kinematics plugin (manipulator) failed to load. Error: According to the loaded plugin descriptions the class trac_ik_kinematics_plugin/TRAC_IKKinematicsPlugin with base class type kinematics::KinematicsBase does not exist. Declared types are cached_ik_kinematics_plugin/CachedKDLKinematicsPlugin cached_ik_kinematics_plugin/CachedSrvKinematicsPlugin kdl_kinematics_plugin/KDLKinematicsPlugin lma_kinematics_plugin/LMAKinematicsPlugin srv_kinematics_plugin/SrvKinematicsPlugin
[ERROR] [1741748757.267544043, 3.122000000]: Kinematics solver could not be instantiated for joint group manipulator.
[ INFO] [1741748757.410979250, 3.268000000]: Starting planning scene monitor
[ INFO] [1741748757.415402824, 3.274000000]: Listening to '/move_group/monitored_planning_scene'
[ INFO] [1741748757.437232819, 3.295000000]: No active joints or end effectors found for group 'manipulator'. Make sure that kinematics.yaml is loaded in this node's namespace.
[ INFO] [1741748757.445731748, 3.302000000]: Constructing new MoveGroup connection for group 'manipulator' in namespace ''
[Err] [REST.cc:205] Error in REST requestlibcurl: (35) error:1408F10B:SSL routines:ssl3_get_record:wrong version number
[ INFO] [1741748758.477108723, 4.300000000]: Ready to take commands for planning group manipulator.
[ INFO] [1741748758.477205054, 4.300000000]: Looking around: no
[ INFO] [1741748758.477238232, 4.300000000]: Replanning: no