Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
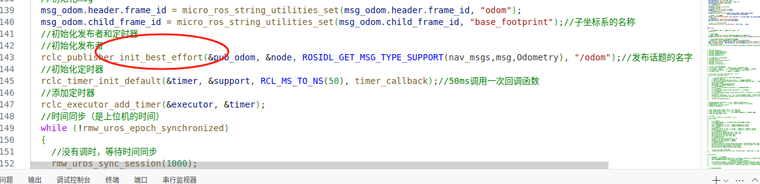
,代码也是best _effort,也可以用键盘控制节点控制小车运行,并且运行ros2 topic echo /odom --once也是有数据的, ,然后在rviz2里面没有显示是什么原因呀?
@1117 改一下qos
@1117 好的,谢谢鱼哥,俺不懂什么是qos,我先再去学学
@1117 yu鱼哥,就是显示雷达者一章节的时候,我改了这个参数的端口,但是为什么终端还是显示laser这个端口呀?因为我是用串口通信,来获取雷达的数据的
@1117 改完后重新构建
 ,代码也是best _effort,也可以用键盘控制节点控制小车运行,并且运行ros2 topic echo /odom --once也是有数据的,
,代码也是best _effort,也可以用键盘控制节点控制小车运行,并且运行ros2 topic echo /odom --once也是有数据的,
 ,然后在rviz2里面没有显示是什么原因呀?
,然后在rviz2里面没有显示是什么原因呀? yu鱼哥,就是显示雷达者一章节的时候,我改了这个参数的端口,但是为什么终端还是显示laser这个端口呀?因为我是用串口通信,来获取雷达的数据的
yu鱼哥,就是显示雷达者一章节的时候,我改了这个参数的端口,但是为什么终端还是显示laser这个端口呀?因为我是用串口通信,来获取雷达的数据的