moveit+gazebo联合仿真时,gazebo中的机械臂直接瘫倒在地上。
-
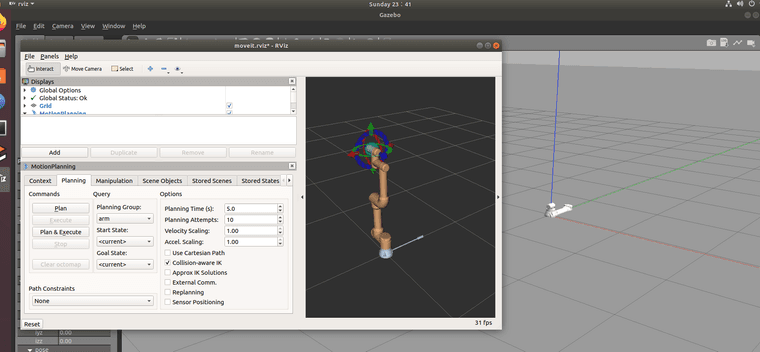
瘫倒状态如上图。
虚拟机ubutun18.041.由ur5官方提供的stp包构建好了urdf功能包,并添加了transsion和gazebo的一些代码,urdf文件内容见如下代码1。
2.根据此urdf文件构建了moveit_config功能包,controller.yaml和launch文件也均已修改,具体内容见如下代码2、代码3
3.启动该功能包下的demo_gazebo.launch文件后,机械臂处于如图中的瘫痪状态。终端反馈信息见信息4。
注:
1.link5打错成了limk5,影响不大。
2.问题应该是出在urdf文件当中,我用已有的别人的urdf文件进行后续配置可以实现联合仿真
3.字数超限制了,部分代码放在评论区中代码1:urdf文件:
<robot
name="ur5"><!-- ROS base_link to UR 'Base' Coordinates transform -->
<link name="base"/>
<joint name="base_link-base_fixed_joint" type="fixed">
<!-- NOTE: this rotation is only needed as long as base_link itself is
not corrected wrt the real robot (ie: rotated over 180
degrees)
-->
<origin rpy="0 0 -3.14159265359" xyz="0 0 0"/>
<parent link="base_link"/>
<child link="base"/>
</joint>
<link name="world"/>
<joint name="world_joint" type="fixed">
<parent link="world"/>
<child link="base_link"/>
<origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.0"/>
</joint>
<link
name="base_link">
<inertial>
<origin
xyz="1.42583680716296E-05 0.0563056334949455 -0.0382829688559687"
rpy="0 0 0" />
<mass
value="0.00001" />
<inertia
ixx="0.00983750560931009"
ixy="-1.72050295815961E-08"
ixz="-3.83638429985162E-07"
iyy="0.00957723573222082"
iyz="-0.00134940422444298"
izz="0.000260297506066691" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/base_link.STL" />
</geometry>
<material
name="">
<color
rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/base_link.STL" />
</geometry>
</collision>
</link>
<link
name="link1">
<inertial>
<origin
xyz="-4.4675E-07 0.00011808 0.010911"
rpy="0 0 0" />
<mass
value="0.00001" />
<inertia
ixx="0"
ixy="0"
ixz="0"
iyy="0"
iyz="0"
izz="0" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/link1.STL" />
</geometry>
<material
name="">
<color
rgba="0.79216 0.81961 0.93333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/link1.STL" />
</geometry>
</collision>
</link>
<joint
name="joint1"
type="revolute">
<origin
xyz="0 0 0.1625"
rpy="1.5708 0 0" />
<parent
link="base_link" />
<child
link="link1" />
<axis
xyz="0 1 0" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
<link
name="link2">
<inertial>
<origin
xyz="-1.4509E-06 0.21249 7.775E-05"
rpy="0 0 0" />
<mass
value="0.00001" />
<inertia
ixx="0"
ixy="0"
ixz="0"
iyy="0"
iyz="0"
izz="0" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/link2.STL" />
</geometry>
<material
name="">
<color
rgba="0.79216 0.81961 0.93333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/link2.STL" />
</geometry>
</collision>
</link>
<joint
name="joint2"
type="revolute">
<origin
xyz="0 0 0.1378"
rpy="0 0 0" />
<parent
link="link1" />
<child
link="link2" />
<axis
xyz="0 0 1" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
<link
name="link3">
<inertial>
<origin
xyz="-8.4001E-07 0.16893 -0.12451"
rpy="0 0 0" />
<mass
value="0.00001" />
<inertia
ixx="0"
ixy="0"
ixz="0"
iyy="0"
iyz="0"
izz="0" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/link3.STL" />
</geometry>
<material
name="">
<color
rgba="0.79216 0.81961 0.93333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/link3.STL" />
</geometry>
</collision>
</link>
<joint
name="joint3"
type="revolute">
<origin
xyz="0 0.425 0"
rpy="0 0 0" />
<parent
link="link2" />
<child
link="link3" />
<axis
xyz="0 0 1" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
<link
name="link4">
<inertial>
<origin
xyz="7.4437E-06 -0.0025477 0.11499"
rpy="0 0 0" />
<mass
value="0.00001" />
<inertia
ixx="1.4253E-06"
ixy="1.9401E-10"
ixz="7.4526E-11"
iyy="1.8328E-07"
iyz="-4.7712E-07"
izz="1.2421E-06" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/link4.STL" />
</geometry>
<material
name="">
<color
rgba="0.79216 0.81961 0.93333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/link4.STL" />
</geometry>
</collision>
</link>
<joint
name="joint4"
type="revolute">
<origin
xyz="0 0.3922 -0.1378"
rpy="0 0 0" />
<parent
link="link3" />
<child
link="link4" />
<axis
xyz="0 0 1" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
<link
name="limk5">
<inertial>
<origin
xyz="-9.43610718074842E-06 0.0921878890416958 -0.00395720124610782"
rpy="0 0 0" />
<mass
value="0.00001" />
<inertia
ixx="0"
ixy="0"
ixz="0"
iyy="0"
iyz="0"
izz="0" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/limk5.STL" />
</geometry>
<material
name="">
<color
rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/limk5.STL" />
</geometry>
</collision>
</link>
<joint
name="joint5"
type="revolute">
<origin
xyz="0 0 0.1333"
rpy="0 0 0" />
<parent
link="link4" />
<child
link="limk5" />
<axis
xyz="0 1 0" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
<link
name="link6">
<inertial>
<origin
xyz="9.99267270212568E-09 -6.06182086970719E-07 0.0253985025583878"
rpy="0 0 0" />
<mass
value="0.00001" />
<inertia
ixx="0"
ixy="0"
ixz="0"
iyy="0"
iyz="0"
izz="0" />
</inertial>
<visual>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/link6.STL" />
</geometry>
<material
name="">
<color
rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" />
</material>
</visual>
<collision>
<origin
xyz="0 0 0"
rpy="0 0 0" />
<geometry>
<mesh
filename="package://ur5/meshes/link6.STL" />
</geometry>
</collision>
</link>
<joint
name="joint6"
type="revolute">
<origin
xyz="0 0.0997 0.0457"
rpy="0 0 0" />
<parent
link="limk5" />
<child
link="link6" />
<axis
xyz="0 0 1" />
<limit
lower="-3.14"
upper="3.14"
effort="100"
velocity="1" />
</joint>
<!--add transmission for every joint-->
<transmission name="trans_joint1">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint1">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="joint1_motor">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="trans_joint2">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint2">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="joint2_motor">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="trans_joint3">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint3">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="joint3_motor">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="trans_joint4">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint4">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="joint4_motor">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="trans_joint5">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint5">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="joint5_motor">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="trans_joint6">
<type>transmission_interface/SimpleTransmission</type>
<joint name="joint6">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
</joint>
<actuator name="joint6_motor">
<hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<!-- add one gazebo plugin-->
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/</robotNamespace>
<robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType>
<legacyModeNS>true</legacyModeNS>
</plugin>
</gazebo>
</robot>代码2:yaml文件
#Simulation settings for using moveit_sim_controllers
moveit_sim_hw_interface:
joint_model_group: arm
joint_model_group_pose: init_pos
#Settings for ros_control_boilerplate control loop
generic_hw_control_loop:
loop_hz: 300
cycle_time_error_threshold: 0.01
#Settings for ros_control hardware interface
hardware_interface:
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
sim_control_mode: 1 # 0: position, 1: velocity
#Publish all joint states
#Creates the /joint_states topic necessary in ROS
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
controller_list:- name: arm_controller
action_ns: follow_joint_trajectory
default: True
type: FollowJointTrajectory
joints:- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
arm_controller:
type: position_controllers/JointTrajectoryController
joints: - joint1
- joint2
- joint3
- joint4
- joint5
- joint6
constraints:
goal_time: 0.6
stopped_velocity_tolerance: 0.05
joint1: {
trajectory: 0.1, goal: 0.1}
joint2 : {
trajectory: 0.1, goal: 0.1}
joint3: {
trajectory: 0.1, goal: 0.1}
joint4: {
trajectory: 0.1, goal: 0.1}
joint5: {
trajectory: 0.1, goal: 0.1}
joint6: {
trajectory: 0.1, goal: 0.1}
stop_trajectory_duration: 0.5
state_publish_rate: 25
action_monitor_rate: 1
代码3:controller launch文件:
<?xml version="1.0"?>
<launch><!-- Load joint controller configurations from YAML file to parameter server -->
<rosparam file="$(find ur5_moveit_config)/config/ros_controllers.yaml" command="load"/><!-- Load the controllers -->
<node name="controller_spawner" pkg="controller_manager" type="controller_manager" respawn="false"
output="screen" args="spawn joint_state_controller arm_controller"/></launch>
- name: arm_controller
-
信息4:终端反馈的信息:
wlz@ubuntu:~/catkin_ws$ roslaunch ur5_moveit_config demo_gazebo.launch
... logging to /home/wlz/.ros/log/4bfb239a-1e86-11f0-9e8b-000c29aa3a06/roslaunch-ubuntu-20237.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.started roslaunch server http://ubuntu:41385/
SUMMARY
PARAMETERS
- /arm_controller/action_monitor_rate: 1
- /arm_controller/constraints/goal_time: 0.6
- /arm_controller/constraints/joint1/goal: 0.1
- /arm_controller/constraints/joint1/trajectory: 0.1
- /arm_controller/constraints/joint2/goal: 0.1
- /arm_controller/constraints/joint2/trajectory: 0.1
- /arm_controller/constraints/joint3/goal: 0.1
- /arm_controller/constraints/joint3/trajectory: 0.1
- /arm_controller/constraints/joint4/goal: 0.1
- /arm_controller/constraints/joint4/trajectory: 0.1
- /arm_controller/constraints/joint5/goal: 0.1
- /arm_controller/constraints/joint5/trajectory: 0.1
- /arm_controller/constraints/joint6/goal: 0.1
- /arm_controller/constraints/joint6/trajectory: 0.1
- /arm_controller/constraints/stopped_velocity_tolerance: 0.05
- /arm_controller/gains/joint1/d: 1.0
- /arm_controller/gains/joint1/i: 10.0
- /arm_controller/gains/joint1/i_clamp_max: 1.0
- /arm_controller/gains/joint1/i_clamp_min: -1.0
- /arm_controller/gains/joint1/p: 100.0
- /arm_controller/gains/joint2/d: 1.0
- /arm_controller/gains/joint2/i: 10.0
- /arm_controller/gains/joint2/i_clamp_max: 1.0
- /arm_controller/gains/joint2/i_clamp_min: -1.0
- /arm_controller/gains/joint2/p: 100.0
- /arm_controller/gains/joint3/d: 1.0
- /arm_controller/gains/joint3/i: 10.0
- /arm_controller/gains/joint3/i_clamp_max: 1.0
- /arm_controller/gains/joint3/i_clamp_min: -1.0
- /arm_controller/gains/joint3/p: 100.0
- /arm_controller/gains/joint4/d: 1.0
- /arm_controller/gains/joint4/i: 10.0
- /arm_controller/gains/joint4/i_clamp_max: 1.0
- /arm_controller/gains/joint4/i_clamp_min: -1.0
- /arm_controller/gains/joint4/p: 100.0
- /arm_controller/gains/joint5/d: 1.0
- /arm_controller/gains/joint5/i: 10.0
- /arm_controller/gains/joint5/i_clamp_max: 1.0
- /arm_controller/gains/joint5/i_clamp_min: -1.0
- /arm_controller/gains/joint5/p: 100.0
- /arm_controller/gains/joint6/d: 1.0
- /arm_controller/gains/joint6/i: 10.0
- /arm_controller/gains/joint6/i_clamp_max: 1.0
- /arm_controller/gains/joint6/i_clamp_min: -1.0
- /arm_controller/gains/joint6/p: 100.0
- /arm_controller/joints: ['joint1', 'joint...
- /arm_controller/state_publish_rate: 25
- /arm_controller/stop_trajectory_duration: 0.5
- /arm_controller/type: effort_controller...
- /controller_list: [{'default': True...
- /gazebo/enable_ros_network: True
- /generic_hw_control_loop/cycle_time_error_threshold: 0.01
- /generic_hw_control_loop/loop_hz: 300
- /hardware_interface/joints: ['joint1', 'joint...
- /hardware_interface/sim_control_mode: 1
- /joint_state_controller/publish_rate: 50
- /joint_state_controller/type: joint_state_contr...
- /joint_state_publisher/source_list: ['/joint_states']
- /move_group/allow_trajectory_execution: True
- /move_group/arm/default_planner_config: RRT
- /move_group/arm/longest_valid_segment_fraction: 0.005
- /move_group/arm/planner_configs: ['SBL', 'EST', 'L...
- /move_group/arm/projection_evaluator: joints(joint1,joi...
- /move_group/arm_controller/action_monitor_rate: 1
- /move_group/arm_controller/constraints/goal_time: 0.6
- /move_group/arm_controller/constraints/joint1/goal: 0.1
- /move_group/arm_controller/constraints/joint1/trajectory: 0.1
- /move_group/arm_controller/constraints/joint2/goal: 0.1
- /move_group/arm_controller/constraints/joint2/trajectory: 0.1
- /move_group/arm_controller/constraints/joint3/goal: 0.1
- /move_group/arm_controller/constraints/joint3/trajectory: 0.1
- /move_group/arm_controller/constraints/joint4/goal: 0.1
- /move_group/arm_controller/constraints/joint4/trajectory: 0.1
- /move_group/arm_controller/constraints/joint5/goal: 0.1
- /move_group/arm_controller/constraints/joint5/trajectory: 0.1
- /move_group/arm_controller/constraints/joint6/goal: 0.1
- /move_group/arm_controller/constraints/joint6/trajectory: 0.1
- /move_group/arm_controller/constraints/stopped_velocity_tolerance: 0.05
- /move_group/arm_controller/gains/joint1/d: 1.0
- /move_group/arm_controller/gains/joint1/i: 10.0
- /move_group/arm_controller/gains/joint1/i_clamp_max: 1.0
- /move_group/arm_controller/gains/joint1/i_clamp_min: -1.0
- /move_group/arm_controller/gains/joint1/p: 100.0
- /move_group/arm_controller/gains/joint2/d: 1.0
- /move_group/arm_controller/gains/joint2/i: 10.0
- /move_group/arm_controller/gains/joint2/i_clamp_max: 1.0
- /move_group/arm_controller/gains/joint2/i_clamp_min: -1.0
- /move_group/arm_controller/gains/joint2/p: 100.0
- /move_group/arm_controller/gains/joint3/d: 1.0
- /move_group/arm_controller/gains/joint3/i: 10.0
- /move_group/arm_controller/gains/joint3/i_clamp_max: 1.0
- /move_group/arm_controller/gains/joint3/i_clamp_min: -1.0
- /move_group/arm_controller/gains/joint3/p: 100.0
- /move_group/arm_controller/gains/joint4/d: 1.0
- /move_group/arm_controller/gains/joint4/i: 10.0
- /move_group/arm_controller/gains/joint4/i_clamp_max: 1.0
- /move_group/arm_controller/gains/joint4/i_clamp_min: -1.0
- /move_group/arm_controller/gains/joint4/p: 100.0
- /move_group/arm_controller/gains/joint5/d: 1.0
- /move_group/arm_controller/gains/joint5/i: 10.0
- /move_group/arm_controller/gains/joint5/i_clamp_max: 1.0
- /move_group/arm_controller/gains/joint5/i_clamp_min: -1.0
- /move_group/arm_controller/gains/joint5/p: 100.0
- /move_group/arm_controller/gains/joint6/d: 1.0
- /move_group/arm_controller/gains/joint6/i: 10.0
- /move_group/arm_controller/gains/joint6/i_clamp_max: 1.0
- /move_group/arm_controller/gains/joint6/i_clamp_min: -1.0
- /move_group/arm_controller/gains/joint6/p: 100.0
- /move_group/arm_controller/joints: ['joint1', 'joint...
- /move_group/arm_controller/state_publish_rate: 25
- /move_group/arm_controller/stop_trajectory_duration: 0.5
- /move_group/arm_controller/type: effort_controller...
- /move_group/capabilities:
- /move_group/controller_list: [{'default': True...
- /move_group/disable_capabilities:
- /move_group/generic_hw_control_loop/cycle_time_error_threshold: 0.01
- /move_group/generic_hw_control_loop/loop_hz: 300
- /move_group/hardware_interface/joints: ['joint1', 'joint...
- /move_group/hardware_interface/sim_control_mode: 1
- /move_group/jiggle_fraction: 0.05
- /move_group/joint_state_controller/publish_rate: 50
- /move_group/joint_state_controller/type: joint_state_contr...
- /move_group/max_range: 5.0
- /move_group/max_safe_path_cost: 1
- /move_group/moveit_controller_manager: moveit_simple_con...
- /move_group/moveit_manage_controllers: True
- /move_group/moveit_sim_hw_interface/joint_model_group: arm
- /move_group/moveit_sim_hw_interface/joint_model_group_pose: init_pos
- /move_group/octomap_resolution: 0.025
- /move_group/planner_configs/BFMT/balanced: 0
- /move_group/planner_configs/BFMT/cache_cc: 1
- /move_group/planner_configs/BFMT/extended_fmt: 1
- /move_group/planner_configs/BFMT/heuristics: 1
- /move_group/planner_configs/BFMT/nearest_k: 1
- /move_group/planner_configs/BFMT/num_samples: 1000
- /move_group/planner_configs/BFMT/optimality: 1
- /move_group/planner_configs/BFMT/radius_multiplier: 1.0
- /move_group/planner_configs/BFMT/type: geometric::BFMT
- /move_group/planner_configs/BKPIECE/border_fraction: 0.9
- /move_group/planner_configs/BKPIECE/failed_expansion_score_factor: 0.5
- /move_group/planner_configs/BKPIECE/min_valid_path_fraction: 0.5
- /move_group/planner_configs/BKPIECE/range: 0.0
- /move_group/planner_configs/BKPIECE/type: geometric::BKPIECE
- /move_group/planner_configs/BiEST/range: 0.0
- /move_group/planner_configs/BiEST/type: geometric::BiEST
- /move_group/planner_configs/BiTRRT/cost_threshold: 1e300
- /move_group/planner_configs/BiTRRT/frountier_node_ratio: 0.1
- /move_group/planner_configs/BiTRRT/frountier_threshold: 0.0
- /move_group/planner_configs/BiTRRT/init_temperature: 100
- /move_group/planner_configs/BiTRRT/range: 0.0
- /move_group/planner_configs/BiTRRT/temp_change_factor: 0.1
- /move_group/planner_configs/BiTRRT/type: geometric::BiTRRT
- /move_group/planner_configs/EST/goal_bias: 0.05
- /move_group/planner_configs/EST/range: 0.0
- /move_group/planner_configs/EST/type: geometric::EST
- /move_group/planner_configs/FMT/cache_cc: 1
- /move_group/planner_configs/FMT/extended_fmt: 1
- /move_group/planner_configs/FMT/heuristics: 0
- /move_group/planner_configs/FMT/nearest_k: 1
- /move_group/planner_configs/FMT/num_samples: 1000
- /move_group/planner_configs/FMT/radius_multiplier: 1.1
- /move_group/planner_configs/FMT/type: geometric::FMT
- /move_group/planner_configs/KPIECE/border_fraction: 0.9
- /move_group/planner_configs/KPIECE/failed_expansion_score_factor: 0.5
- /move_group/planner_configs/KPIECE/goal_bias: 0.05
- /move_group/planner_configs/KPIECE/min_valid_path_fraction: 0.5
- /move_group/planner_configs/KPIECE/range: 0.0
- /move_group/planner_configs/KPIECE/type: geometric::KPIECE
- /move_group/planner_configs/LBKPIECE/border_fraction: 0.9
- /move_group/planner_configs/LBKPIECE/min_valid_path_fraction: 0.5
- /move_group/planner_configs/LBKPIECE/range: 0.0
- /move_group/planner_configs/LBKPIECE/type: geometric::LBKPIECE
- /move_group/planner_configs/LBTRRT/epsilon: 0.4
- /move_group/planner_configs/LBTRRT/goal_bias: 0.05
- /move_group/planner_configs/LBTRRT/range: 0.0
- /move_group/planner_configs/LBTRRT/type: geometric::LBTRRT
- /move_group/planner_configs/LazyPRM/range: 0.0
- /move_group/planner_configs/LazyPRM/type: geometric::LazyPRM
- /move_group/planner_configs/LazyPRMstar/type: geometric::LazyPR...
- /move_group/planner_configs/PDST/type: geometric::PDST
- /move_group/planner_configs/PRM/max_nearest_neighbors: 10
- /move_group/planner_configs/PRM/type: geometric::PRM
- /move_group/planner_configs/PRMstar/type: geometric::PRMstar
- /move_group/planner_configs/ProjEST/goal_bias: 0.05
- /move_group/planner_configs/ProjEST/range: 0.0
- /move_group/planner_configs/ProjEST/type: geometric::ProjEST
- /move_group/planner_configs/RRT/goal_bias: 0.05
- /move_group/planner_configs/RRT/range: 0.0
- /move_group/planner_configs/RRT/type: geometric::RRT
- /move_group/planner_configs/RRTConnect/range: 0.0
- /move_group/planner_configs/RRTConnect/type: geometric::RRTCon...
- /move_group/planner_configs/RRTstar/delay_collision_checking: 1
- /move_group/planner_configs/RRTstar/goal_bias: 0.05
- /move_group/planner_configs/RRTstar/range: 0.0
- /move_group/planner_configs/RRTstar/type: geometric::RRTstar
- /move_group/planner_configs/SBL/range: 0.0
- /move_group/planner_configs/SBL/type: geometric::SBL
- /move_group/planner_configs/SPARS/dense_delta_fraction: 0.001
- /move_group/planner_configs/SPARS/max_failures: 1000
- /move_group/planner_configs/SPARS/sparse_delta_fraction: 0.25
- /move_group/planner_configs/SPARS/stretch_factor: 3.0
- /move_group/planner_configs/SPARS/type: geometric::SPARS
- /move_group/planner_configs/SPARStwo/dense_delta_fraction: 0.001
- /move_group/planner_configs/SPARStwo/max_failures: 5000
- /move_group/planner_configs/SPARStwo/sparse_delta_fraction: 0.25
- /move_group/planner_configs/SPARStwo/stretch_factor: 3.0
- /move_group/planner_configs/SPARStwo/type: geometric::SPARStwo
- /move_group/planner_configs/STRIDE/degree: 16
- /move_group/planner_configs/STRIDE/estimated_dimension: 0.0
- /move_group/planner_configs/STRIDE/goal_bias: 0.05
- /move_group/planner_configs/STRIDE/max_degree: 18
- /move_group/planner_configs/STRIDE/max_pts_per_leaf: 6
- /move_group/planner_configs/STRIDE/min_degree: 12
- /move_group/planner_configs/STRIDE/min_valid_path_fraction: 0.2
- /move_group/planner_configs/STRIDE/range: 0.0
- /move_group/planner_configs/STRIDE/type: geometric::STRIDE
- /move_group/planner_configs/STRIDE/use_projected_distance: 0
- /move_group/planner_configs/TRRT/frountierNodeRatio: 0.1
- /move_group/planner_configs/TRRT/frountier_threshold: 0.0
- /move_group/planner_configs/TRRT/goal_bias: 0.05
- /move_group/planner_configs/TRRT/init_temperature: 10e-6
- /move_group/planner_configs/TRRT/k_constant: 0.0
- /move_group/planner_configs/TRRT/max_states_failed: 10
- /move_group/planner_configs/TRRT/min_temperature: 10e-10
- /move_group/planner_configs/TRRT/range: 0.0
- /move_group/planner_configs/TRRT/temp_change_factor: 2.0
- /move_group/planner_configs/TRRT/type: geometric::TRRT
- /move_group/planning_plugin: ompl_interface/OM...
- /move_group/planning_scene_monitor/publish_geometry_updates: True
- /move_group/planning_scene_monitor/publish_planning_scene: True
- /move_group/planning_scene_monitor/publish_state_updates: True
- /move_group/planning_scene_monitor/publish_transforms_updates: True
- /move_group/request_adapters: default_planner_r...
- /move_group/sensors: [{}, {}]
- /move_group/start_state_max_bounds_error: 0.1
- /move_group/trajectory_execution/allowed_execution_duration_scaling: 1.2
- /move_group/trajectory_execution/allowed_goal_duration_margin: 0.5
- /move_group/trajectory_execution/allowed_start_tolerance: 0.01
- /moveit_sim_hw_interface/joint_model_group: arm
- /moveit_sim_hw_interface/joint_model_group_pose: init_pos
- /robot_description: <...>
- /robot_description_kinematics/arm/kinematics_solver: kdl_kinematics_pl...
- /robot_description_kinematics/arm/kinematics_solver_search_resolution: 0.005
- /robot_description_kinematics/arm/kinematics_solver_timeout: 0.005
- /robot_description_planning/cartesian_limits/max_rot_vel: 1.57
- /robot_description_planning/cartesian_limits/max_trans_acc: 2.25
- /robot_description_planning/cartesian_limits/max_trans_dec: -5
- /robot_description_planning/cartesian_limits/max_trans_vel: 1
- /robot_description_planning/joint_limits/joint1/has_acceleration_limits: False
- /robot_description_planning/joint_limits/joint1/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint1/max_acceleration: 0
- /robot_description_planning/joint_limits/joint1/max_velocity: 1
- /robot_description_planning/joint_limits/joint2/has_acceleration_limits: False
- /robot_description_planning/joint_limits/joint2/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint2/max_acceleration: 0
- /robot_description_planning/joint_limits/joint2/max_velocity: 1
- /robot_description_planning/joint_limits/joint3/has_acceleration_limits: False
- /robot_description_planning/joint_limits/joint3/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint3/max_acceleration: 0
- /robot_description_planning/joint_limits/joint3/max_velocity: 1
- /robot_description_planning/joint_limits/joint4/has_acceleration_limits: False
- /robot_description_planning/joint_limits/joint4/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint4/max_acceleration: 0
- /robot_description_planning/joint_limits/joint4/max_velocity: 1
- /robot_description_planning/joint_limits/joint5/has_acceleration_limits: False
- /robot_description_planning/joint_limits/joint5/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint5/max_acceleration: 0
- /robot_description_planning/joint_limits/joint5/max_velocity: 1
- /robot_description_planning/joint_limits/joint6/has_acceleration_limits: False
- /robot_description_planning/joint_limits/joint6/has_velocity_limits: True
- /robot_description_planning/joint_limits/joint6/max_acceleration: 0
- /robot_description_planning/joint_limits/joint6/max_velocity: 1
- /robot_description_semantic: <?xml version="1....
- /rosdistro: melodic
- /rosversion: 1.14.13
- /use_sim_time: True
NODES
/
controller_spawner (controller_manager/controller_manager)
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
joint_state_publisher (joint_state_publisher/joint_state_publisher)
move_group (moveit_ros_move_group/move_group)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz_ubuntu_20237_4335575107870997936 (rviz/rviz)
spawn_gazebo_model (gazebo_ros/spawn_model)auto-starting new master
process[master]: started with pid [20248]
ROS_MASTER_URI=http://localhost:11311setting /run_id to 4bfb239a-1e86-11f0-9e8b-000c29aa3a06
process[rosout-1]: started with pid [20259]
started core service [/rosout]
process[gazebo-2]: started with pid [20266]
process[gazebo_gui-3]: started with pid [20271]
process[spawn_gazebo_model-4]: started with pid [20276]
process[controller_spawner-5]: started with pid [20277]
process[joint_state_publisher-6]: started with pid [20278]
process[robot_state_publisher-7]: started with pid [20279]
process[move_group-8]: started with pid [20284]
process[rviz_ubuntu_20237_4335575107870997936-9]: started with pid [20287]
[ INFO] [1745222260.363244886]: Loading robot model 'ur5'...
[ INFO] [1745222260.364989494]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1745222260.494560184]: rviz version 1.13.30
[ INFO] [1745222260.494591722]: compiled against Qt version 5.9.5
[ INFO] [1745222260.494595988]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1745222260.518764872]: Forcing OpenGl version 0.
[ INFO] [1745222260.722250625]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1745222260.723508491]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
[ INFO] [1745222260.760316358]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1745222260.761426299]: waitForService: Service [/gazebo_gui/set_physics_properties] has not been advertised, waiting...
[INFO] [1745222261.035135, 0.000000]: Loading model XML from ros parameter robot_description
[INFO] [1745222261.039118, 0.000000]: Waiting for service /gazebo/spawn_urdf_model
[ INFO] [1745222261.105124409]: Publishing maintained planning scene on 'monitored_planning_scene'
[ INFO] [1745222261.105965327]: MoveGroup debug mode is ON
Starting planning scene monitors...
[ INFO] [1745222261.105977776]: Starting planning scene monitor
[ INFO] [1745222261.106623188]: Listening to '/planning_scene'
[ INFO] [1745222261.106642626]: Starting world geometry update monitor for collision objects, attached objects, octomap updates.
[ INFO] [1745222261.107250822]: Listening to '/collision_object'
[ INFO] [1745222261.107848528]: Listening to '/planning_scene_world' for planning scene world geometry
[ERROR] [1745222261.108177843]: No sensor plugin specified for octomap updater 0; ignoring.
[ERROR] [1745222261.108194339]: No sensor plugin specified for octomap updater 1; ignoring.
[ INFO] [1745222261.524284989]: Listening to '/attached_collision_object' for attached collision objects
Planning scene monitors started.
[ INFO] [1745222261.532819038]: Initializing OMPL interface using ROS parameters
[ INFO] [1745222261.538223872]: Using planning interface 'OMPL'
[ INFO] [1745222261.539396056]: Param 'default_workspace_bounds' was not set. Using default value: 10
[ INFO] [1745222261.539664402]: Param 'start_state_max_bounds_error' was set to 0.1
[ INFO] [1745222261.539802002]: Param 'start_state_max_dt' was not set. Using default value: 0.5
[ INFO] [1745222261.540023891]: Param 'start_state_max_dt' was not set. Using default value: 0.5
[ INFO] [1745222261.540209116]: Param 'jiggle_fraction' was set to 0.05
[ INFO] [1745222261.540325418]: Param 'max_sampling_attempts' was not set. Using default value: 100
[ INFO] [1745222261.540348881]: Using planning request adapter 'Add Time Parameterization'
[ INFO] [1745222261.540353281]: Using planning request adapter 'Fix Workspace Bounds'
[ INFO] [1745222261.540376863]: Using planning request adapter 'Fix Start State Bounds'
[ INFO] [1745222261.540389910]: Using planning request adapter 'Fix Start State In Collision'
[ INFO] [1745222261.540393710]: Using planning request adapter 'Fix Start State Path Constraints'
[ INFO] [1745222262.315186965]: Stereo is NOT SUPPORTED
[ INFO] [1745222262.316773424]: OpenGL device: SVGA3D; build: RELEASE; LLVM;
[ INFO] [1745222262.316864831]: OpenGl version: 2.1 (GLSL 1.2).
[ INFO] [1745222262.671448245]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1745222262.692236903, 0.003000000]: Physics dynamic reconfigure ready.
[INFO] [1745222262.845087, 0.142000]: Calling service /gazebo/spawn_urdf_model
[INFO] [1745222262.923867, 0.181000]: Spawn status: SpawnModel: Successfully spawned entity
[spawn_gazebo_model-4] process has finished cleanly
log file: /home/wlz/.ros/log/4bfb239a-1e86-11f0-9e8b-000c29aa3a06/spawn_gazebo_model-4*.log
[ INFO] [1745222263.142571411, 0.181000000]: Loading gazebo_ros_control plugin
[ INFO] [1745222263.142673823, 0.181000000]: Starting gazebo_ros_control plugin in namespace: /
[ INFO] [1745222263.143422135, 0.181000000]: gazebo_ros_control plugin is waiting for model URDF in parameter [robot_description] on the ROS param server.
[ INFO] [1745222263.252471974, 0.181000000]: Loaded gazebo_ros_control.
Loaded 'joint_state_controller'
Loaded 'arm_controller'
Started ['joint_state_controller'] successfully
Started ['arm_controller'] successfully
[Err] [REST.cc:205] Error in REST requestlibcurl: (51) SSL: no alternative certificate subject name matches target host name 'api.ignitionfuel.org'
[controller_spawner-5] process has finished cleanly
log file: /home/wlz/.ros/log/4bfb239a-1e86-11f0-9e8b-000c29aa3a06/controller_spawner-5*.log
[ INFO] [1745222263.739094299, 0.607000000]: Added FollowJointTrajectory controller for arm_controller
[ INFO] [1745222263.739193923, 0.607000000]: Returned 1 controllers in list
[ INFO] [1745222263.746224175, 0.607000000]: Trajectory execution is managing controllers
Loading 'move_group/ApplyPlanningSceneService'...
Loading 'move_group/ClearOctomapService'...
Loading 'move_group/MoveGroupCartesianPathService'...
Loading 'move_group/MoveGroupExecuteTrajectoryAction'...
Loading 'move_group/MoveGroupGetPlanningSceneService'...
Loading 'move_group/MoveGroupKinematicsService'...
Loading 'move_group/MoveGroupMoveAction'...
Loading 'move_group/MoveGroupPickPlaceAction'...
Loading 'move_group/MoveGroupPlanService'...
Loading 'move_group/MoveGroupQueryPlannersService'...
Loading 'move_group/MoveGroupStateValidationService'...
[ INFO] [1745222263.774589680, 0.635000000]:
- MoveGroup using:
-
- ApplyPlanningSceneService -
- ClearOctomapService -
- CartesianPathService -
- ExecuteTrajectoryAction -
- GetPlanningSceneService -
- KinematicsService -
- MoveAction -
- PickPlaceAction -
- MotionPlanService -
- QueryPlannersService -
- StateValidationService
[ INFO] [1745222263.774862296, 0.635000000]: MoveGroup context using planning plugin ompl_interface/OMPLPlanner
[ INFO] [1745222263.774961446, 0.635000000]: MoveGroup context initialization completeYou can start planning now!
[ INFO] [1745222266.381338979, 3.212000000]: Loading robot model 'ur5'...
[ INFO] [1745222266.381578969, 3.213000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1745222267.110574561, 3.947000000]: Starting planning scene monitor
[ INFO] [1745222267.111989507, 3.949000000]: Listening to '/move_group/monitored_planning_scene'
[ INFO] [1745222267.358729135, 4.203000000]: Constructing new MoveGroup connection for group 'arm' in namespace ''
[ INFO] [1745222268.358171206, 5.170000000]: Ready to take commands for planning group arm.
[ INFO] [1745222268.358261926, 5.170000000]: Looking around: no
[ INFO] [1745222268.358272424, 5.170000000]: Replanning: no -
此回复已被删除! -
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="true" output="screen" />在你的gzaebo.launch或者demo.launch文件中看这段代码中的type后面的值是不是少敲了robot_