二驱版fishbot,imu无法连接
-
此回复已被删除! -
@小鱼 我用的就是这个新的,但是一直卡在
void setup() {
Serial.begin(115200); // 初始化串口通信,波特率为115200
Wire.begin(18,19); // 初始化I2C总线,设置SDA引脚为18,SCL 引脚为19 // #byte status = mpu.begin(); // 启动MPU6050传感器,并获取状态
Serial.print(F("MPU6050 status: "));
Serial.println(status);
while(status!=0){ Serial.print(F("error "));} // stop everything if could not connect to MPU6050
这个地方死循环 -
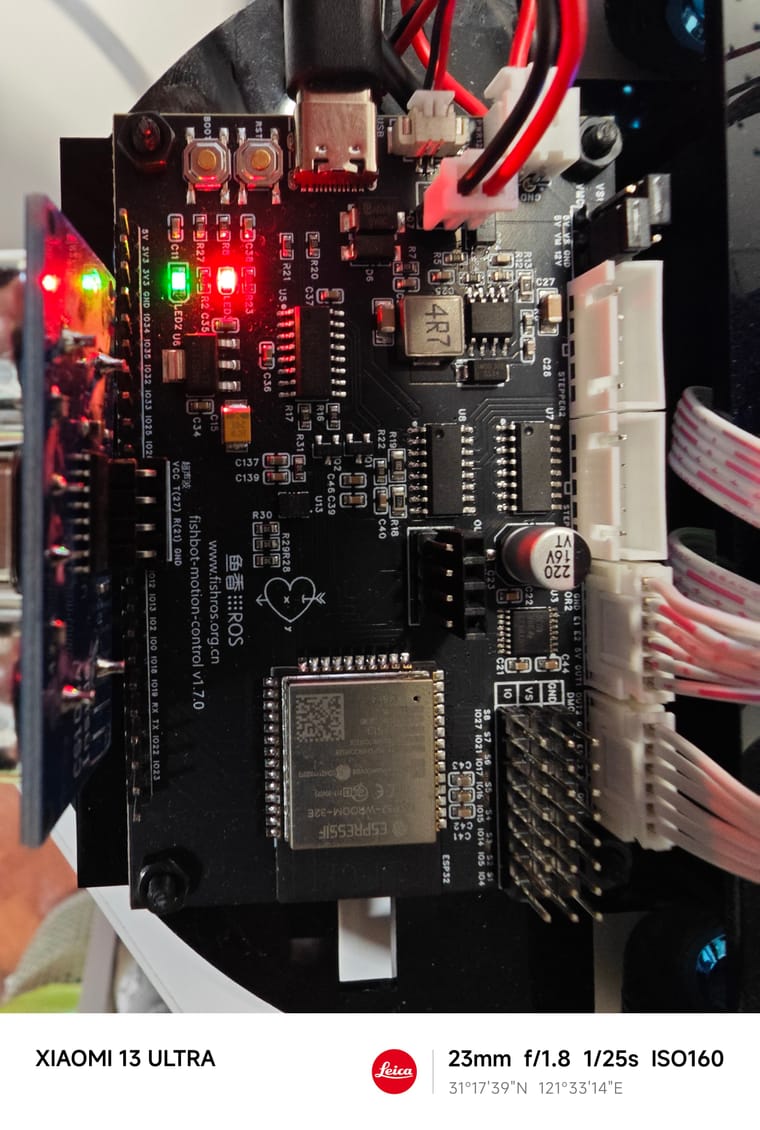
@330190572 开发板版本是多少的,拍个照片看看
-
-
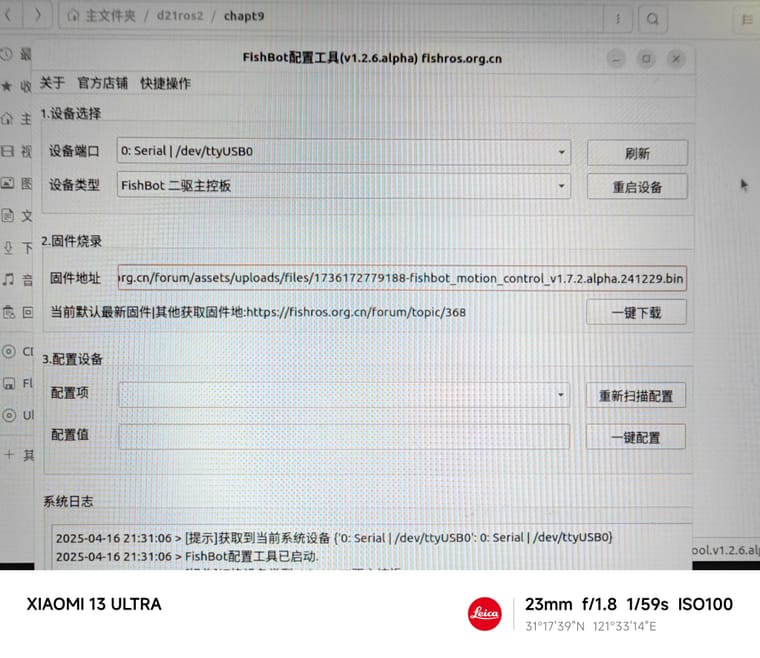
@330190572 确认下驱动版本,不行下编译好的固件,连上microros 看看imu话题有没有数据
-
@小鱼
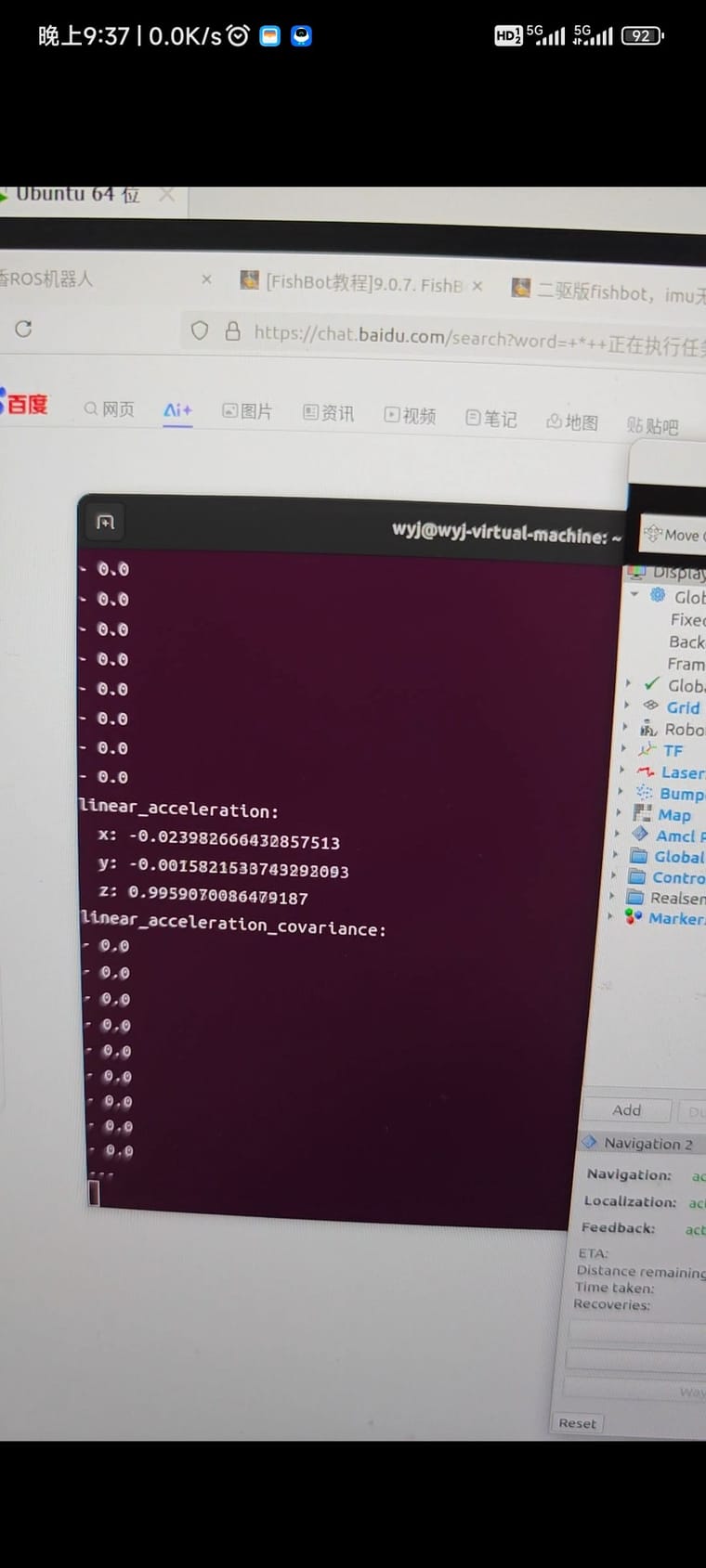 有数据,小车在移动的时候,x,y,z在变化
有数据,小车在移动的时候,x,y,z在变化 -
@小鱼 另外,建图的时候,为什么图会乱转
-
@小鱼 但是imu数据变化很小(小车在移动过程中),这对吗
-
@330190572 加速度不大情况下应该正常
-
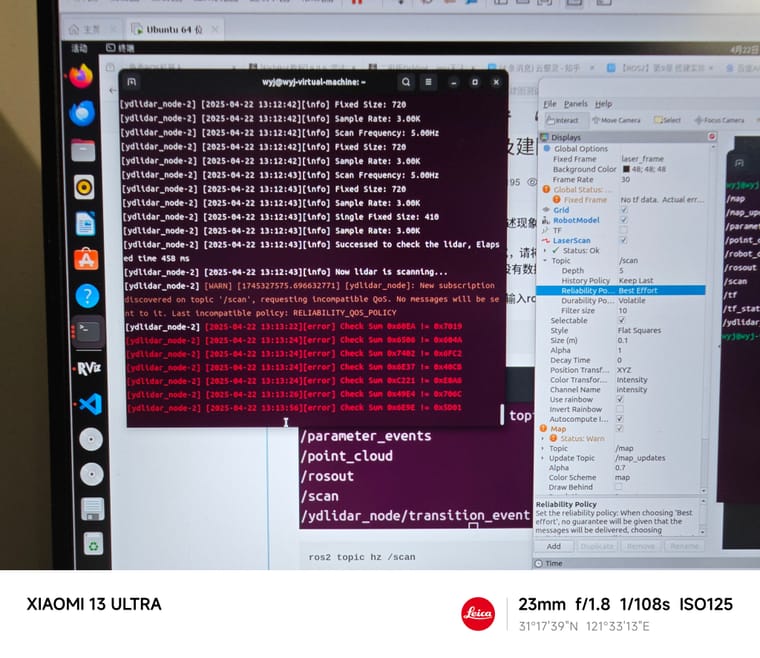
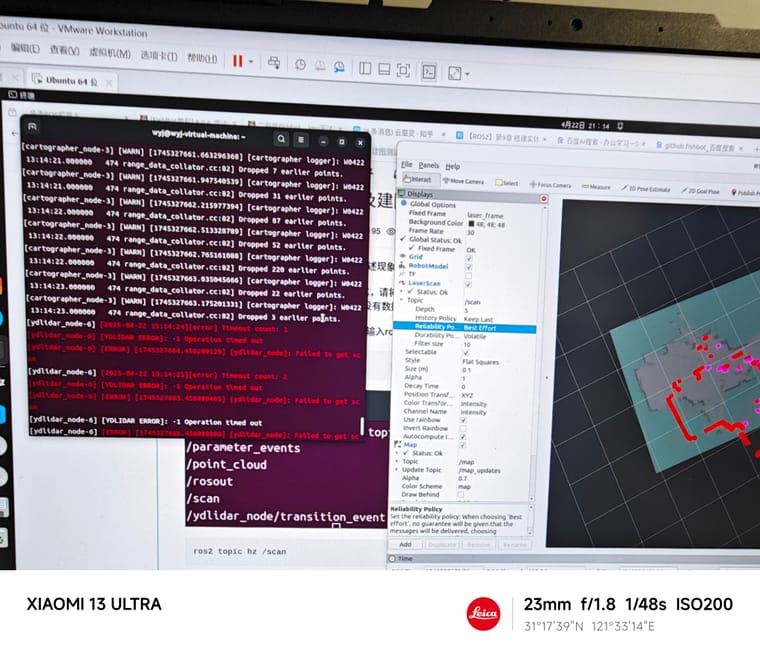
@小鱼 那在图中显示的,执行雷达驱动扫描的时候报的错,check sum,,,,,等等,是啥意思,有什么问题吗
-
@330190572 只要不是一直刷这个错误就没事