Nav2启动时地图无法加载的问题
-
Nav2启动时Rviz2里无法正常加载地图。
系统配置如下:
Linux:Ubuntu 22.04
ROS2:Humble
雷达话题:/scan
里程计话题:bringup发布的是/odom1,和IMU通过ekf融合后输出的话题是/odom配置文件如下:
amcl:
ros__parameters:
use_sim_time: False
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_footprint"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"pf_err: 0.05 pf_z: 0.99 recovery_alpha_fast: 0.0 recovery_alpha_slow: 0.0 resample_interval: 1 robot_model_type: "nav2_amcl::DifferentialMotionModel" save_pose_rate: 0.5 sigma_hit: 0.2 tf_broadcast: true transform_tolerance: 1.0 update_min_a: 0.2 update_min_d: 0.25 z_hit: 0.5 z_max: 0.05 z_rand: 0.5 z_short: 0.05 scan_topic: scanamcl_map_client:
ros__parameters:
use_sim_time: Falseamcl_rclcpp_node:
ros__parameters:
use_sim_time: Falsebt_navigator:
ros__parameters:
use_sim_time: False
global_frame: map
robot_base_frame: base_link
odom_topic: /odom
bt_loop_duration: 10
default_server_timeout: 20
# default_bt_xml_filename: "/home/hermes/161/fishbot/src/fishbot_navigation2/xml/my_xml.xml"
# default_nav_to_pose_bt_xml: "/home/hermes/161/fishbot/src/fishbot_navigation2/xml/my_xml.xml"
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_smooth_path_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_back_up_action_bt_node
- nav2_drive_on_heading_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_globally_updated_goal_condition_bt_node
- nav2_is_path_valid_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_truncate_path_local_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_path_expiring_timer_condition
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_planner_selector_bt_node
- nav2_controller_selector_bt_node
- nav2_goal_checker_selector_bt_node
- nav2_controller_cancel_bt_node
- nav2_path_longer_on_approach_bt_node
- nav2_wait_cancel_bt_node
- nav2_spin_cancel_bt_node
- nav2_back_up_cancel_bt_node
- nav2_drive_on_heading_cancel_bt_nodebt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: Falsecontroller_server:
ros__parameters:
use_sim_time: False
controller_frequency: 20.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.001
min_theta_velocity_threshold: 0.001
failure_tolerance: 0.9
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker"
controller_plugins: ["FollowPath"]# Progress checker parameters progress_checker: plugin: "nav2_controller::SimpleProgressChecker" required_movement_radius: 3.14 movement_time_allowance: 50.0 # Goal checker parameters #precise_goal_checker: # plugin: "nav2_controller::SimpleGoalChecker" # xy_goal_tolerance: 0.25 # yaw_goal_tolerance: 0.25 # stateful: True general_goal_checker: stateful: True plugin: "nav2_controller::SimpleGoalChecker" xy_goal_tolerance: 0.25 yaw_goal_tolerance: 0.25 # DWB parameters FollowPath: plugin: "dwb_core::DWBLocalPlanner" debug_trajectory_details: True min_vel_x: -0.0 min_vel_y: -0.0 max_vel_x: 0.23 max_vel_y: 0.0 max_vel_theta: 0.81 # 修改最大角速度 min_speed_xy: -0.0 max_speed_xy: 0.22 min_speed_theta: -0.11 acc_lim_x: 1.0 acc_lim_y: 1.0 acc_lim_theta: 6.1 # 修改角速度加速度限制 decel_lim_x: -2.5 decel_lim_y: 0.0 decel_lim_theta: -0.3 # 修改角速度减速度限制 vx_samples: 30 # 增加线速度样本数量 vy_samples: 10 vtheta_samples: 20 sim_time: 3.0 linear_granularity: 0.05 angular_granularity: 0.025 transform_tolerance: 0.2 xy_goal_tolerance: 0.25 trans_stopped_velocity: 0.25 short_circuit_trajectory_evaluation: True stateful: True critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"] BaseObstacle.scale: 0.01 # 减小与障碍物距离的权重 PathAlign.scale: 48.0 # 增加与路径对齐的权重 PathAlign.forward_point_distance: 0.1 GoalAlign.scale: 36.0 # 增加与目标对齐的权重 GoalAlign.forward_point_distance: 0.1 PathDist.scale: 48.0 # 增加路径距离的权重 GoalDist.scale: 36.0 # 增加目标距离的权重 RotateToGoal.scale: 32.0 RotateToGoal.slowing_factor: 5.0 RotateToGoal.lookahead_time: -1.0controller_server_rclcpp_node:
ros__parameters:
use_sim_time: Falselocal_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: odom
robot_base_frame: base_link
use_sim_time: False
rolling_window: true
width: 3
height: 3
resolution: 0.05
robot_radius: 0.45
plugins: ["static_layer", "obstacle_layer", "voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.6
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
always_send_full_costmap: True
local_costmap_client:
ros__parameters:
use_sim_time: False
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: Falseglobal_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_link
use_sim_time: False
robot_radius: 0.45
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.6
always_send_full_costmap: True
global_costmap_client:
ros__parameters:
use_sim_time: False
global_costmap_rclcpp_node:
ros__parameters:
use_sim_time: Falsemap_server:
ros__parameters:
use_sim_time: False
yaml_filename: "turtlebot3_world.yaml"map_saver:
ros__parameters:
use_sim_time: False
save_map_timeout: 5.0
free_thresh_default: 0.25
occupied_thresh_default: 0.65
map_subscribe_transient_local: Trueplanner_server:
ros__parameters:
expected_planner_frequency: 20.0
use_sim_time: False
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.5
use_astar: false
allow_unknown: trueplanner_server_rclcpp_node:
ros__parameters:
use_sim_time: Falsesmoother_server:
ros__parameters:
use_sim_time: False
smoother_plugins: ["simple_smoother"]
simple_smoother:
plugin: "nav2_smoother::SimpleSmoother"
tolerance: 1.0e-10
max_its: 1000
do_refinement: Truebehavior_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
behavior_plugins: ["spin", "backup", "drive_on_heading", "wait"]
spin:
plugin: "nav2_behaviors/Spin"
backup:
plugin: "nav2_behaviors/BackUp"
drive_on_heading:
plugin: "nav2_behaviors/DriveOnHeading"
wait:
plugin: "nav2_behaviors/Wait"
global_frame: odom
robot_base_frame: base_link
transform_tolerance: 0.1
use_sim_time: False
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2robot_state_publisher:
ros__parameters:
use_sim_time: Falsewaypoint_follower:
ros__parameters:
loop_rate: 20
stop_on_failure: false
waypoint_task_executor_plugin: "wait_at_waypoint"
wait_at_waypoint:
plugin: "nav2_waypoint_follower::WaitAtWaypoint"
enabled: True
waypoint_pause_duration: 200报错如下:
[INFO] [launch]: All log files can be found below /home/agx/.ros/log/2025-05-14-08-08-56-824411-ubuntu-7779
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [component_container_isolated-1]: process started with pid [7792]
[INFO] [rviz2-2]: process started with pid [7794]
[component_container_isolated-1] [INFO] [1747224537.918626279] [nav2_container]: Load Library: /home/agx/nav2_ws/install/nav2_map_server/lib/libmap_server_core.so
[component_container_isolated-1] [INFO] [1747224537.962328846] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_map_server::CostmapFilterInfoServer>
[component_container_isolated-1] [INFO] [1747224537.962416269] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_map_server::MapSaver>
[component_container_isolated-1] [INFO] [1747224537.962429933] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_map_server::MapServer>
[component_container_isolated-1] [INFO] [1747224537.962438829] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_map_server::MapServer>
[component_container_isolated-1] [INFO] [1747224537.976989477] [map_server]:
[component_container_isolated-1] map_server lifecycle node launched.
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/map_server' in container '/nav2_container'
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1747224537.977090020] [map_server]: Creating
[component_container_isolated-1] [INFO] [1747224537.983997123] [nav2_container]: Load Library: /home/agx/nav2_ws/install/nav2_amcl/lib/libamcl_core.so
[component_container_isolated-1] [INFO] [1747224537.997021194] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_amcl::AmclNode>
[component_container_isolated-1] [INFO] [1747224537.997120297] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_amcl::AmclNode>
[component_container_isolated-1] [INFO] [1747224538.011386499] [amcl]:
[component_container_isolated-1] amcl lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1747224538.016541139] [amcl]: Creating
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/amcl' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1747224538.031733797] [nav2_container]: Load Library: /home/agx/nav2_ws/install/nav2_lifecycle_manager/lib/libnav2_lifecycle_manager_core.so
[component_container_isolated-1] [INFO] [1747224538.035436258] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[component_container_isolated-1] [INFO] [1747224538.035504577] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[component_container_isolated-1] [INFO] [1747224538.049036003] [lifecycle_manager_localization]: Creating
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/lifecycle_manager_localization' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1747224538.056538269] [lifecycle_manager_localization]: Creating and initializing lifecycle service clients
[component_container_isolated-1] [INFO] [1747224538.057436692] [nav2_container]: Load Library: /home/agx/nav2_ws/install/nav2_controller/lib/libcontroller_server_core.so
[component_container_isolated-1] [INFO] [1747224538.071887117] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_controller::ControllerServer>
[component_container_isolated-1] [INFO] [1747224538.071976044] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_controller::ControllerServer>
[component_container_isolated-1] [INFO] [1747224538.087189726] [lifecycle_manager_localization]: Starting managed nodes bringup...
[component_container_isolated-1] [INFO] [1747224538.087283613] [lifecycle_manager_localization]: Configuring map_server
[component_container_isolated-1] [INFO] [1747224538.087617402] [map_server]: Configuring
[component_container_isolated-1] [INFO] [1747224538.087746201] [map_io]: Loading yaml file: /home/agx/semantic_map_ws/install/bot_navigation2/share/bot_navigation2/maps/indoor_labelled.yaml
[component_container_isolated-1] [INFO] [1747224538.088744751] [map_io]: resolution: 0.05
[component_container_isolated-1] [INFO] [1747224538.088790319] [map_io]: origin[0]: -44.4
[component_container_isolated-1] [INFO] [1747224538.088801359] [map_io]: origin[1]: -50
[component_container_isolated-1] [INFO] [1747224538.088807951] [map_io]: origin[2]: 0
[component_container_isolated-1] [INFO] [1747224538.088813615] [map_io]: free_thresh: 0.25
[component_container_isolated-1] [INFO] [1747224538.088818702] [map_io]: occupied_thresh: 0.65
[component_container_isolated-1] [INFO] [1747224538.088827598] [map_io]: mode: trinary
[component_container_isolated-1] [INFO] [1747224538.088835342] [map_io]: negate: 0
[component_container_isolated-1] [INFO] [1747224538.094173052] [map_io]: Loading image_file: /home/agx/semantic_map_ws/install/bot_navigation2/share/bot_navigation2/maps/indoor.pgm
[component_container_isolated-1] [INFO] [1747224538.095581551] [controller_server]:
[component_container_isolated-1] controller_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1747224538.126407759] [controller_server]: Creating controller server
[component_container_isolated-1] [INFO] [1747224538.146205525] [local_costmap.local_costmap]:
[component_container_isolated-1] local_costmap lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1747224538.151738274] [local_costmap.local_costmap]: Creating Costmap
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/controller_server' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1747224538.159312699] [nav2_container]: Load Library: /home/agx/nav2_ws/install/nav2_smoother/lib/libsmoother_server_core.so
[component_container_isolated-1] [INFO] [1747224538.166488856] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_smoother::SmootherServer>
[component_container_isolated-1] [INFO] [1747224538.166576695] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_smoother::SmootherServer>
[component_container_isolated-1] [INFO] [1747224538.186081696] [smoother_server]:
[component_container_isolated-1] smoother_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1747224538.191682892] [smoother_server]: Creating smoother server
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/smoother_server' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1747224538.197455926] [nav2_container]: Load Library: /home/agx/nav2_ws/install/nav2_planner/lib/libplanner_server_core.so
[component_container_isolated-1] [INFO] [1747224538.201347089] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_planner::PlannerServer>
[component_container_isolated-1] [INFO] [1747224538.201407857] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_planner::PlannerServer>
[component_container_isolated-1] [INFO] [1747224538.217642233] [planner_server]:
[component_container_isolated-1] planner_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1747224538.223365731] [planner_server]: Creating
[component_container_isolated-1] [INFO] [1747224538.242474129] [global_costmap.global_costmap]:
[component_container_isolated-1] global_costmap lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1747224538.244314815] [global_costmap.global_costmap]: Creating Costmap
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/planner_server' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1747224538.254491968] [nav2_container]: Load Library: /home/agx/nav2_ws/install/nav2_behaviors/lib/libbehavior_server_core.so
[component_container_isolated-1] [INFO] [1747224538.268253279] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<behavior_server::BehaviorServer>
[component_container_isolated-1] [INFO] [1747224538.268321567] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<behavior_server::BehaviorServer>
[component_container_isolated-1] [INFO] [1747224538.284715461] [behavior_server]:
[component_container_isolated-1] behavior_server lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/behavior_server' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1747224538.296269241] [nav2_container]: Load Library: /home/agx/nav2_ws/install/nav2_bt_navigator/lib/libbt_navigator_core.so
[component_container_isolated-1] [INFO] [1747224538.304106480] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_bt_navigator::BtNavigator>
[component_container_isolated-1] [INFO] [1747224538.304175119] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_bt_navigator::BtNavigator>
[component_container_isolated-1] [INFO] [1747224538.321664651] [bt_navigator]:
[component_container_isolated-1] bt_navigator lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1747224538.321792426] [bt_navigator]: Creating
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/bt_navigator' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1747224538.325634406] [nav2_container]: Load Library: /home/agx/nav2_ws/install/nav2_waypoint_follower/lib/libwaypoint_follower_core.so
[component_container_isolated-1] [INFO] [1747224538.328594635] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_waypoint_follower::WaypointFollower>
[component_container_isolated-1] [INFO] [1747224538.328644714] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_waypoint_follower::WaypointFollower>
[component_container_isolated-1] [INFO] [1747224538.344109561] [waypoint_follower]:
[component_container_isolated-1] waypoint_follower lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1747224538.347691000] [waypoint_follower]: Creating
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/waypoint_follower' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1747224538.352402988] [nav2_container]: Load Library: /home/agx/nav2_ws/install/nav2_velocity_smoother/lib/libvelocity_smoother_core.so
[component_container_isolated-1] [INFO] [1747224538.356282727] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_velocity_smoother::VelocitySmoother>
[component_container_isolated-1] [INFO] [1747224538.356422374] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_velocity_smoother::VelocitySmoother>
[component_container_isolated-1] [INFO] [1747224538.375497492] [velocity_smoother]:
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/velocity_smoother' in container '/nav2_container'
[component_container_isolated-1] velocity_smoother lifecycle node launched.
[component_container_isolated-1] Waiting on external lifecycle transitions to activate
[component_container_isolated-1] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[component_container_isolated-1] [INFO] [1747224538.378981395] [nav2_container]: Found class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[component_container_isolated-1] [INFO] [1747224538.379051154] [nav2_container]: Instantiate class: rclcpp_components::NodeFactoryTemplate<nav2_lifecycle_manager::LifecycleManager>
[component_container_isolated-1] [INFO] [1747224538.393011536] [lifecycle_manager_navigation]: Creating
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node '/lifecycle_manager_navigation' in container '/nav2_container'
[component_container_isolated-1] [INFO] [1747224538.397875298] [lifecycle_manager_navigation]: Creating and initializing lifecycle service clients
[component_container_isolated-1] [INFO] [1747224538.401186307] [map_io]: Read map /home/agx/semantic_map_ws/install/bot_navigation2/share/bot_navigation2/maps/indoor.pgm: 1531 X 1510 map @ 0.05 m/cell
[component_container_isolated-1] [INFO] [1747224538.415737531] [lifecycle_manager_localization]: Configuring amcl
[component_container_isolated-1] [INFO] [1747224538.415991641] [amcl]: Configuring
[component_container_isolated-1] [INFO] [1747224538.416156727] [amcl]: initTransforms
[component_container_isolated-1] [INFO] [1747224538.444377231] [amcl]: initPubSub
[component_container_isolated-1] [INFO] [1747224538.449217474] [lifecycle_manager_navigation]: Starting managed nodes bringup...
[component_container_isolated-1] [INFO] [1747224538.449367520] [lifecycle_manager_navigation]: Configuring controller_server
[component_container_isolated-1] [INFO] [1747224538.449921755] [controller_server]: Configuring controller interface
[component_container_isolated-1] [INFO] [1747224538.450360087] [controller_server]: getting goal checker plugins..
[component_container_isolated-1] [INFO] [1747224538.450577941] [controller_server]: Controller frequency set to 20.0000Hz
[component_container_isolated-1] [INFO] [1747224538.450642740] [local_costmap.local_costmap]: Configuring
[component_container_isolated-1] [INFO] [1747224538.458376652] [amcl]: Subscribed to map topic.
[component_container_isolated-1] [INFO] [1747224538.460541560] [local_costmap.local_costmap]: Using plugin "static_layer"
[component_container_isolated-1] [INFO] [1747224538.477393658] [local_costmap.local_costmap]: Subscribing to the map topic (/map) with transient local durability
[component_container_isolated-1] [INFO] [1747224538.482347596] [local_costmap.local_costmap]: Initialized plugin "static_layer"
[component_container_isolated-1] [INFO] [1747224538.482412875] [local_costmap.local_costmap]: Using plugin "obstacle_layer"
[component_container_isolated-1] [INFO] [1747224538.484549463] [lifecycle_manager_localization]: Activating map_server
[component_container_isolated-1] [INFO] [1747224538.484803733] [map_server]: Activating
[component_container_isolated-1] [INFO] [1747224538.485179761] [local_costmap.local_costmap]: Subscribed to Topics: scan
[component_container_isolated-1] [INFO] [1747224538.486572388] [map_server]: Creating bond (map_server) to lifecycle manager.
[component_container_isolated-1] malloc(): invalid size (unsorted)
[component_container_isolated-1] Magick: abort due to signal 6 (SIGABRT) "Abort"...
[rviz2-2] [INFO] [1747224538.742160396] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-2] [INFO] [1747224538.742477769] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
[rviz2-2] [INFO] [1747224538.824175565] [rviz2]: Stereo is NOT SUPPORTED
[ERROR] [component_container_isolated-1]: process has died [pid 7792, exit code -6, cmd '/opt/ros/humble/lib/rclcpp_components/component_container_isolated --ros-args --log-level info --ros-args -r __node:=nav2_container --params-file /tmp/launch_params_02dgqwm7 --params-file /tmp/launch_params_tcc1vpuj -r /tf:=tf -r /tf_static:=tf_static'].
[rviz2-2] [INFO] [1747224539.960257189] [rviz2]: Message Filter dropping message: frame 'laser' at time 1747224539.063 for reason 'discarding message because the queue is full'
[rviz2-2] [INFO] [1747224540.055364491] [rviz2]: Message Filter dropping message: frame 'laser' at time 1747224539.150 for reason 'discarding message because the queue is full'
[rviz2-2] [INFO] [1747224540.119518419] [rviz2]: Message Filter dropping message: frame 'laser' at time 1747224539.230 for reason 'discarding message because the queue is full'
[rviz2-2] [INFO] [1747224540.215937772] [rviz2]: Message Filter dropping message: frame 'laser' at time 1747224539.310 for reason 'discarding message because the queue is full'
[rviz2-2] [INFO] [1747224540.279572121] [rviz2]: Message Filter dropping message: frame 'laser' at time 1747224539.390 for reason 'discarding message because the queue is full'
[rviz2-2] [INFO] [1747224540.375857876] [rviz2]: Message Filter dropping message: frame 'laser' at time 1747224539.469 for reason 'discarding message because the queue is full'
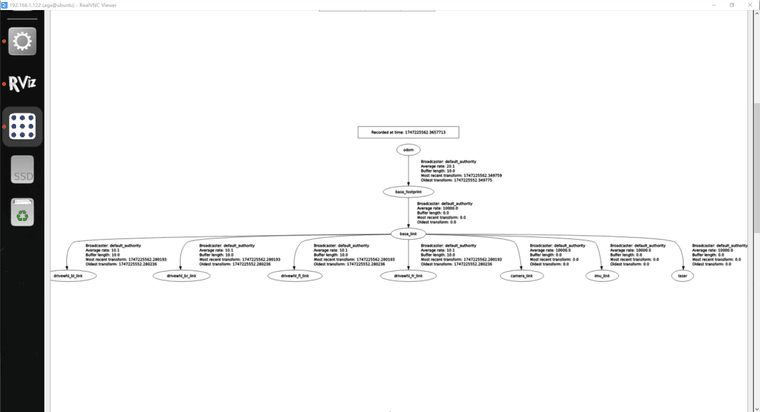
[rviz2-2] [INFO] [1747224540.439654143] [rviz2]: Message Filter dropping message: frame 'laser' at time 1747224539.555 for reason 'discarding message because the queue is full'TF树如下:
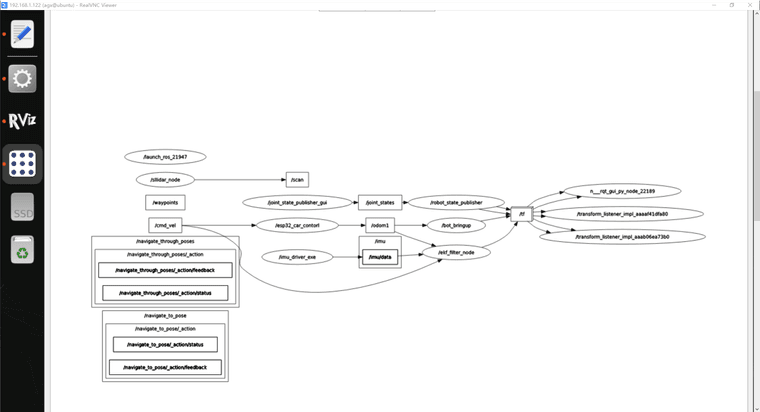
节点话题关系如下: