运行驱动雷达时候报错
-
1,背景
运行以下命令时候出现的问题
sk@sk-virtual-machine:~$ xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
access control disabled, clients can connect from any host
欢迎鱼香ROS使用雷达驱动系统,注意当前版本为ROS2版本驱动哦~- WIFI转串口测试
- 驱动雷达
- 建图测试
- 退出
2,历史
在此之前运行1:WIFI转串口测试时候一直等待TCP连接: 0.0.0.0:8888
sk@sk-virtual-machine:~$ xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
access control disabled, clients can connect from any host
欢迎鱼香ROS使用雷达驱动系统,注意当前版本为ROS2版本驱动哦~- WIFI转串口测试
- 驱动雷达
- 建图测试
- 退出
#? 1
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-05-21-04-34-59-859928-54f59d59956a-58
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ydlidar_tcp_node-1]: process started with pid [59]
[ydlidar_tcp_node-1] [INFO] [1747802100.203626086] [ydlidar_node]: 等待激光雷达TCP连接: 0.0.0.0:8888
和客服沟通后更换雷达和驱动板后,还是报如上错误。
但是我发现,重启后不运行nc -l 8889 ,直接运行WIFI转串口测试时候激光雷达能够连接
sk@sk-virtual-machine:~$ xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
access control disabled, clients can connect from any host
欢迎鱼香ROS使用雷达驱动系统,注意当前版本为ROS2版本驱动哦~- WIFI转串口测试
- 驱动雷达
- 建图测试
- 退出
#? 1
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-05-21-04-37-37-024833-678890575e23-58
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ydlidar_tcp_node-1]: process started with pid [59]
[ydlidar_tcp_node-1] [INFO] [1747802257.698494317] [ydlidar_node]: 等待激光雷达TCP连接: 0.0.0.0:8888
[ydlidar_tcp_node-1] [INFO] [1747802258.099266293] [ydlidar_node]: 激光雷达已连接: ('192.168.1.102', 50711)
随后,跟着课程,退出输入2时候出现问题,报如下错误
#? 2
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-05-21-04-38-25-908601-678890575e23-86
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ydlidar_tcp_node-1]: process started with pid [87]
[ydlidar_tcp_node-1] Traceback (most recent call last):
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/ydlidar/ydlidar_tcp_node", line 33, in <module>
[ydlidar_tcp_node-1] sys.exit(load_entry_point('ydlidar==0.0.0', 'console_scripts', 'ydlidar_tcp_node')())
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/python3.10/site-packages/ydlidar/ydlidar_tcp_node.py", line 321, in main
[ydlidar_tcp_node-1] node = YdlidarNode()
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/python3.10/site-packages/ydlidar/ydlidar_tcp_node.py", line 26, in init
[ydlidar_tcp_node-1] self._init_tcp()
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/python3.10/site-packages/ydlidar/ydlidar_tcp_node.py", line 57, in _init_tcp
[ydlidar_tcp_node-1] self.sock.bind((host, port))
[ydlidar_tcp_node-1] OSError: [Errno 98] Address already in use
[ERROR] [ydlidar_tcp_node-1]: process has died [pid 87, exit code 1, cmd '/workspace/install/ydlidar/lib/ydlidar/ydlidar_tcp_node --ros-args'].
-
@shawn 在 运行驱动雷达时候报错 中说:
[ydlidar_tcp_node-1] OSError: [Errno 98] Address already in use 端口占用,不要用nc 和驱动两者是冲突的,
重启下电脑再测试一次
-
@小鱼 还是不行还是报错
sk@sk-virtual-machine:~$ xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
access control disabled, clients can connect from any host
欢迎鱼香ROS使用雷达驱动系统,注意当前版本为ROS2版本驱动哦~- WIFI转串口测试
- 驱动雷达
- 建图测试
- 退出
#? 1
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-05-21-05-11-45-756903-c29ca861fb21-58
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ydlidar_tcp_node-1]: process started with pid [59]
[ydlidar_tcp_node-1] [INFO] [1747804306.055214187] [ydlidar_node]: 等待激光雷达TCP连接: 0.0.0.0:8888
[ydlidar_tcp_node-1] [INFO] [1747804306.256195371] [ydlidar_node]: 激光雷达已连接: ('192.168.1.102', 53796)
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[ydlidar_tcp_node-1] Traceback (most recent call last):
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/ydlidar/ydlidar_tcp_node", line 33, in <module>
[ydlidar_tcp_node-1] sys.exit(load_entry_point('ydlidar==0.0.0', 'console_scripts', 'ydlidar_tcp_node')())
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/python3.10/site-packages/ydlidar/ydlidar_tcp_node.py", line 322, in main
[ydlidar_tcp_node-1] rclpy.spin(node)
[ydlidar_tcp_node-1] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/init.py", line 222, in spin
[ydlidar_tcp_node-1] executor.spin_once()
[ydlidar_tcp_node-1] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/executors.py", line 704, in spin_once
[ydlidar_tcp_node-1] handler, entity, node = self.wait_for_ready_callbacks(timeout_sec=timeout_sec)
[ydlidar_tcp_node-1] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/executors.py", line 690, in wait_for_ready_callbacks
[ydlidar_tcp_node-1] return next(self._cb_iter)
[ydlidar_tcp_node-1] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/executors.py", line 619, in _wait_for_ready_callbacks
[ydlidar_tcp_node-1] if tmr.handle.pointer in timers_ready:
[ydlidar_tcp_node-1] File "/opt/ros/humble/local/lib/python3.10/dist-packages/rclpy/timer.py", line 36, in handle
[ydlidar_tcp_node-1] @property
[ydlidar_tcp_node-1] KeyboardInterrupt
[ERROR] [ydlidar_tcp_node-1]: process has died [pid 59, exit code -2, cmd '/workspace/install/ydlidar/lib/ydlidar/ydlidar_tcp_node --ros-args'].
#? 2
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-05-21-05-11-50-512720-c29ca861fb21-86
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ydlidar_tcp_node-1]: process started with pid [87]
[ydlidar_tcp_node-1] Traceback (most recent call last):
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/ydlidar/ydlidar_tcp_node", line 33, in <module>
[ydlidar_tcp_node-1] sys.exit(load_entry_point('ydlidar==0.0.0', 'console_scripts', 'ydlidar_tcp_node')())
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/python3.10/site-packages/ydlidar/ydlidar_tcp_node.py", line 321, in main
[ydlidar_tcp_node-1] node = YdlidarNode()
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/python3.10/site-packages/ydlidar/ydlidar_tcp_node.py", line 26, in init
[ydlidar_tcp_node-1] self._init_tcp()
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/python3.10/site-packages/ydlidar/ydlidar_tcp_node.py", line 57, in _init_tcp
[ydlidar_tcp_node-1] self.sock.bind((host, port))
[ydlidar_tcp_node-1] OSError: [Errno 98] Address already in use
[ERROR] [ydlidar_tcp_node-1]: process has died [pid 87, exit code 1, cmd '/workspace/install/ydlidar/lib/ydlidar/ydlidar_tcp_node --ros-args'].
-
@小鱼 报错内容和上面的一样
-
-
@小鱼
1)退出后不重启小车直接输入 xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
选择2后终端报:
sk@sk-virtual-machine:~$ xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
access control disabled, clients can connect from any host
欢迎鱼香ROS使用雷达驱动系统,注意当前版本为ROS2版本驱动哦~- WIFI转串口测试
- 驱动雷达
- 建图测试
- 退出
#? 2
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-05-22-06-07-17-593240-c88ec6ad0dda-58
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ydlidar_tcp_node-1]: process started with pid [59]
[ydlidar_tcp_node-1] [INFO] [1747894037.948174067] [ydlidar_node]: 等待激光雷达TCP连接: 0.0.0.0:8888
卡在等待激光雷达TCP连接
2)小车重启后输入命令,直接选择2.驱动雷达,终端报:
sk@sk-virtual-machine:~$ xhost + && sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged -v /tmp/.X11-unix:/tmp/.X11-unix --device /dev/snd -e DISPLAY=unix$DISPLAY -p 8889:8888 registry.cn-hangzhou.aliyuncs.com/fishros/fishbot_laser
access control disabled, clients can connect from any host
欢迎鱼香ROS使用雷达驱动系统,注意当前版本为ROS2版本驱动哦~- WIFI转串口测试
- 驱动雷达
- 建图测试
- 退出
#? 2
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-05-22-06-11-02-000224-18ad5fa9cad9-58
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ydlidar_tcp_node-1]: process started with pid [59]
[ydlidar_tcp_node-1] [INFO] [1747894262.589658925] [ydlidar_node]: 等待激光雷达TCP连接: 0.0.0.0:8888
[ydlidar_tcp_node-1] [INFO] [1747894263.090458116] [ydlidar_node]: 激光雷达已连接: ('192.168.1.102', 54697)
卡在激光雷达已连接
3)ctrl+c后输入2终端报:
#? 2
[INFO] [launch]: All log files can be found below /root/.ros/log/2025-05-22-06-11-44-061844-18ad5fa9cad9-86
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ydlidar_tcp_node-1]: process started with pid [87]
[ydlidar_tcp_node-1] Traceback (most recent call last):
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/ydlidar/ydlidar_tcp_node", line 33, in <module>
[ydlidar_tcp_node-1] sys.exit(load_entry_point('ydlidar==0.0.0', 'console_scripts', 'ydlidar_tcp_node')())
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/python3.10/site-packages/ydlidar/ydlidar_tcp_node.py", line 321, in main
[ydlidar_tcp_node-1] node = YdlidarNode()
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/python3.10/site-packages/ydlidar/ydlidar_tcp_node.py", line 26, in init
[ydlidar_tcp_node-1] self._init_tcp()
[ydlidar_tcp_node-1] File "/workspace/install/ydlidar/lib/python3.10/site-packages/ydlidar/ydlidar_tcp_node.py", line 57, in _init_tcp
[ydlidar_tcp_node-1] self.sock.bind((host, port))
[ydlidar_tcp_node-1] OSError: [Errno 98] Address already in use
[ERROR] [ydlidar_tcp_node-1]: process has died [pid 87, exit code 1, cmd '/workspace/install/ydlidar/lib/ydlidar/ydlidar_tcp_node --ros-args'].
#?
报上面相同错误 -
@shawn nc -l 8889 有数据流吗
-
@小鱼 没有数据流,只有在小车重启后输入会有招呼语
-
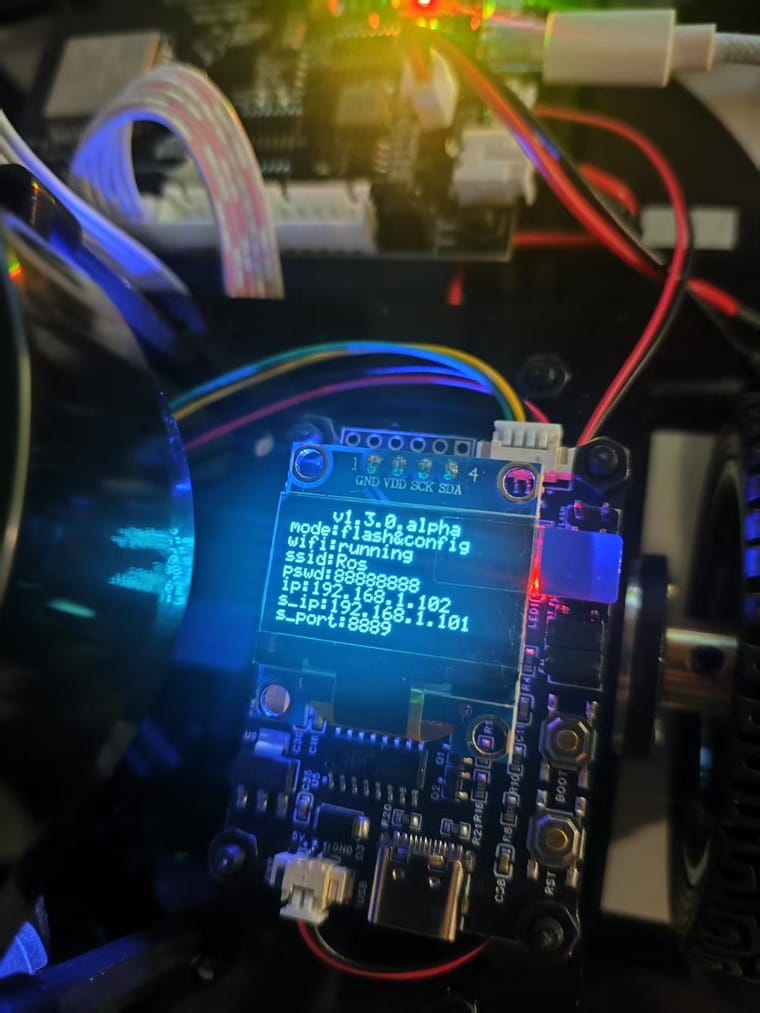
@shawn 拍一下雷达板照片
-
-
@shawn 微信联系我下
-
最终发现,跳线帽插错了,注意是两个跳线帽都要变。感谢大佬感谢感谢感感谢!跪谢大佬的协助!