Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
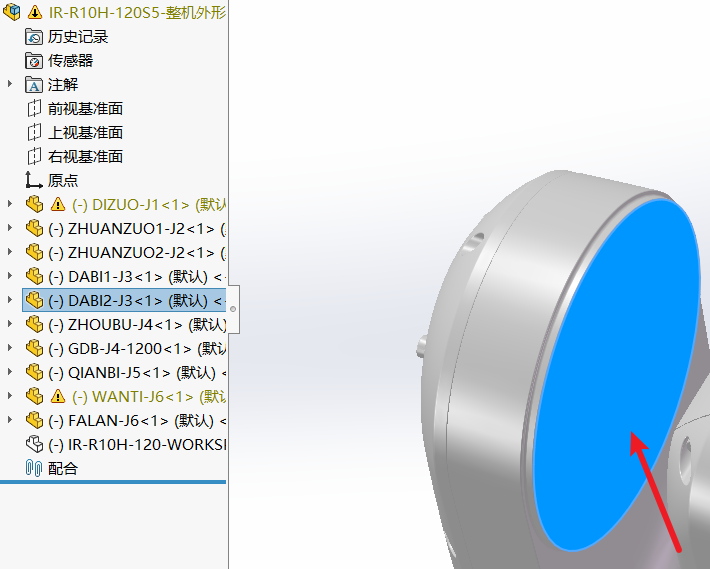
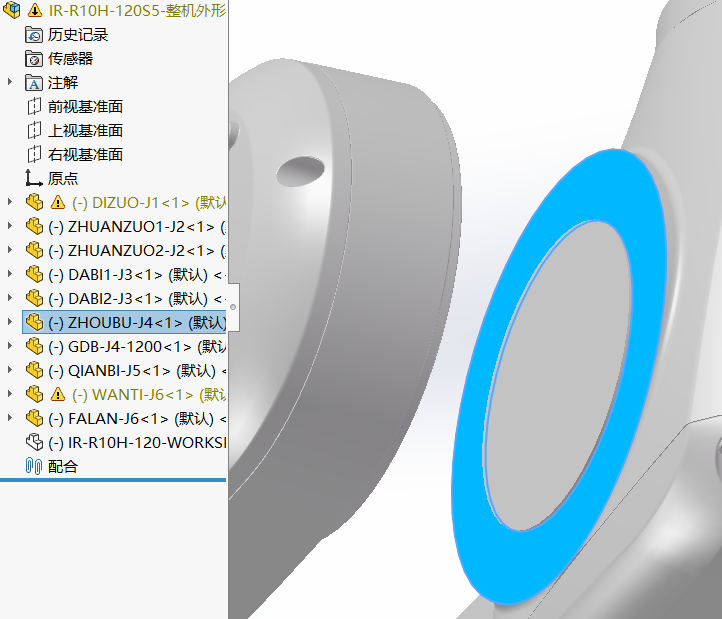
大家好,请问在使用ROS2做机械臂开发的时候,机械臂厂家给的.STP文件和真实机械臂存在出入,具体为:.STP模型中的零件之间的两个接触面非平行面,导致装配不起来,从而没办法从solidworks中导出urdf。请问这种情况应该怎么办